
出于对文章范围的严谨性的限制,本文的讨论范围限定在类Unix系统而非纯粹的GNU/Linux下,主要因为Unix 的进程管理基于经典的 fork()/exec()模型,调度和 IPC 机制较为简单,适合早期单核系统,当然,也更适合学习。
进程基础
进程是操作系统的抽象概念,用于组织多个资源,包括:
- 地址空间
- 共享内存区域
- 一个或多个线程
- 定时器(Timer)
- 打开的文件(文件描述符)
- 信号处理程序(Signal Handler)
- 套接字(Socket)
- 其他资源以及状态信息
- 信号量(semaphore)
所有这些信息都被组织在进程控制块(PCB)中。在 Linux 中,PCB 对应的结构体是 struct task_struct,定义在 /includes/linux/sched.h中:
struct task_struct {
/* these are hardcoded - don't touch */
long state; /* -1 unrunnable, 0 runnable, >0 stopped */
long counter;
long priority;
long signal;
struct sigaction sigaction[32];
long blocked; /* bitmap of masked signals */
/* various fields */
int exit_code;
unsigned long start_code,end_code,end_data,brk,start_stack;
long pid,father,pgrp,session,leader;
unsigned short uid,euid,suid;
unsigned short gid,egid,sgid;
long alarm;
long utime,stime,cutime,cstime,start_time;
unsigned short used_math;
/* file system info */
int tty; /* -1 if no tty, so it must be signed */
unsigned short umask;
struct m_inode * pwd;
struct m_inode * root;
struct m_inode * executable;
unsigned long close_on_exec;
struct file * filp[NR_OPEN];
/* ldt for this task 0 - zero 1 - cs 2 - ds&ss */
struct desc_struct ldt[3];
/* tss for this task */
struct tss_struct tss;
};
自顶向下,初探UNIX进程
我们可以在 /proc/<pid> 目录中获取关于进程资源的摘要信息,其中 <pid> 是我们要查看的进程的进程 ID。
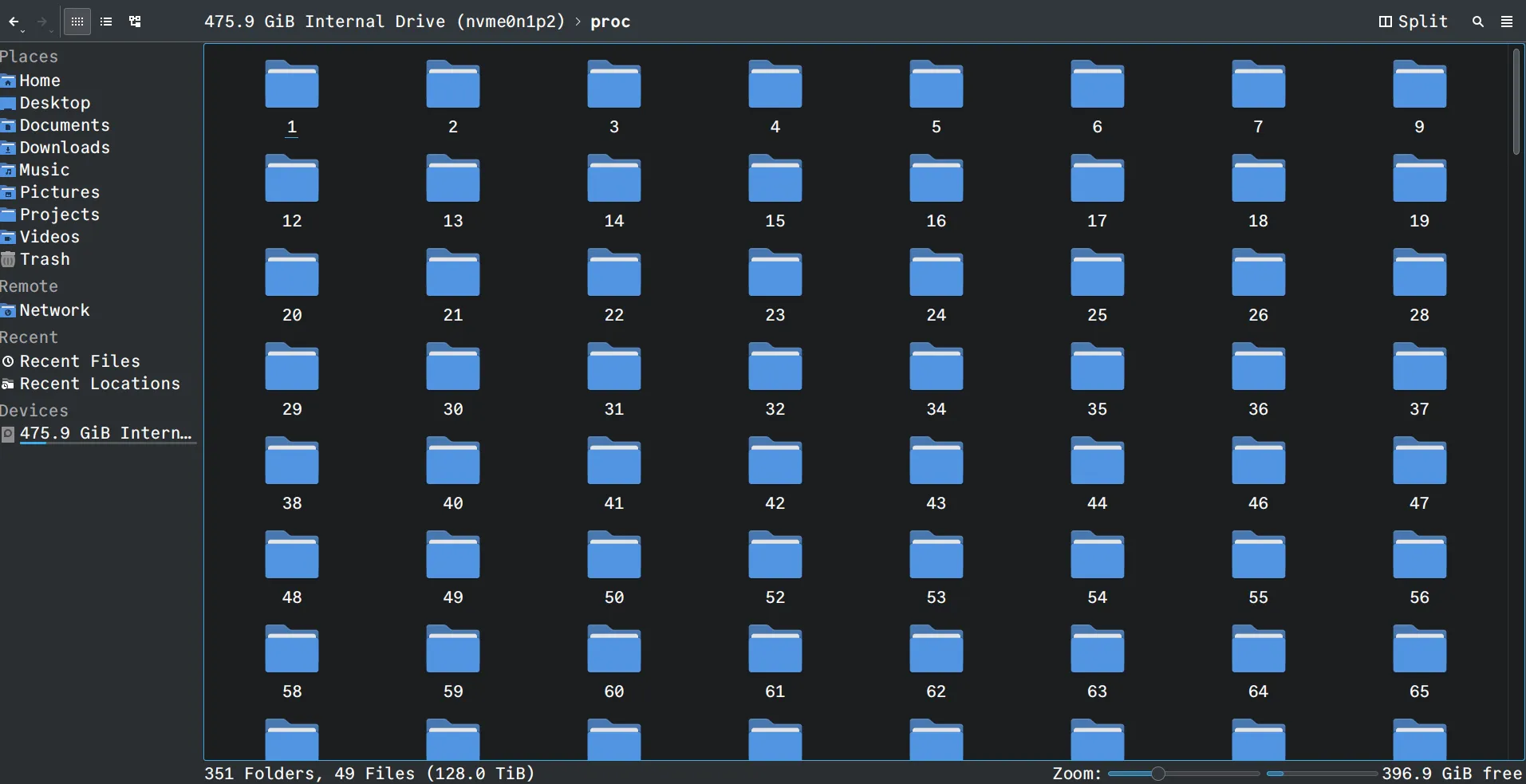
聪明如你,应该发现了一个奇怪的地方:
这块硬盘的大小只有475.9GB,但是这个proc文件夹的大小却高达128TB!
岂不是说内存都快比硬盘还大了?
这里的讨论就超出了本文的进程内容,只用知道,这里的128TB是虚拟内存的大小就行了,并不是真正的内存大小。
我们也可以通过指令的形式来查虚拟进程目录 /proc,这里我们来看看一个重要的虚拟进程目录 /proc/self
+-------------------------------------------------------------------+
| dr-x------ 2 tavi tavi 0 2021 03 14 12:34 . |
| dr-xr-xr-x 6 tavi tavi 0 2021 03 14 12:34 .. |
| lrwx------ 1 tavi tavi 64 2021 03 14 12:34 0 -> /dev/pts/4 |
+--->| lrwx------ 1 tavi tavi 64 2021 03 14 12:34 1 -> /dev/pts/4 |
| | lrwx------ 1 tavi tavi 64 2021 03 14 12:34 2 -> /dev/pts/4 |
| | lr-x------ 1 tavi tavi 64 2021 03 14 12:34 3 -> /proc/18312/fd |
| +-------------------------------------------------------------------+
| +----------------------------------------------------------------+
| | 08048000-0804c000 r-xp 00000000 08:02 16875609 /bin/cat |
$ ls -1 /proc/self/ | 0804c000-0804d000 rw-p 00003000 08:02 16875609 /bin/cat |
cmdline | | 0804d000-0806e000 rw-p 0804d000 00:00 0 [heap] |
cwd | | ... |
environ | +----------->| b7f46000-b7f49000 rw-p b7f46000 00:00 0 |
exe | | | b7f59000-b7f5b000 rw-p b7f59000 00:00 0 |
fd --------+ | | b7f5b000-b7f77000 r-xp 00000000 08:02 11601524 /lib/ld-2.7.so |
fdinfo | | b7f77000-b7f79000 rw-p 0001b000 08:02 11601524 /lib/ld-2.7.so |
maps -----------+ | bfa05000-bfa1a000 rw-p bffeb000 00:00 0 [stack] |
mem | ffffe000-fffff000 r-xp 00000000 00:00 0 [vdso] |
root +----------------------------------------------------------------+
stat +----------------------------+
statm | Name: cat |
status ------+ | State: R (running) |
task | | Tgid: 18205 |
wchan +------>| Pid: 18205 |
| PPid: 18133 |
| Uid: 1000 1000 1000 1000 |
| Gid: 1000 1000 1000 1000 |
+----------------------------+/proc/self/ 目录包含与当前进程相关的各种文件和子目录,这些文件提供了进程的运行时状态、资源使用情况以及其他元数据。
- cmdline : 包含进程的完整命令行参数,以 null 字符(\0)分隔。
- comm : 包含进程的命令名称(可执行文件的名称)。
- environ : 包含进程的环境变量列表,以 null 字符分隔。
- exe : 一个符号链接,指向进程的可执行文件。
- fd/ : 一个目录,包含进程打开的文件描述符(file descriptors)的符号链接,每个文件描述符以数字命名。
- maps : 显示进程的内存映射信息,包括代码段、数据段、堆、栈以及共享库的地址范围。
- status : 提供进程的详细状态信息,如 PID、PPID、内存使用、线程数、用户/组 ID 等。
- stat : 提供进程的统计信息,以空格分隔的数字格式,包含 CPU 使用、状态、优先级等。
- limits : 显示进程的资源限制,如最大文件描述符数、最大内存等。
- cwd : 一个符号链接,指向进程的当前工作目录(current working directory)。
- root : 一个符号链接,指向进程的根目录(通常是 /,但在 chroot 环境中可能不同)。
- mounts : 列出进程可见的挂载点信息。
- sched : 提供调度相关的信息,如优先级和调度策略。
- task/ : 一个目录,包含子目录,每个子目录对应进程的一个线程,内容类似于 /proc/self/。
- fdinfo/ : 包含每个文件描述符的详细信息,如文件位置、标志等。
- net/ : 包含与网络相关的信息,如网络接口、协议统计等。
- auxv : 包含传递给进程的辅助向量(auxiliary vector)信息
值得一提的是,/proc/self其实一个动态生成的符号链接, 实际上是指向 /proc/<当前进程PID>,因此每次访问时都会解析到正确的进程目录。
除了/self之外,/proc中其他的文件也起到了提供信息的作用。/proc 文件系统(包括 /proc/self/)的设计理念是将内核和进程信息以文件系统的形式暴露,旨在提供一种简单、灵活且用户友好的方式来访问内核和进程的运行时信息。通过文本文件和层次化结构,它为用户、管理员和开发者提供了一种通用的、低门槛的方式来访问系统状态,同时保持了安全性和高效性。
这种设计在 Linux 的历史中被证明是成功的,尽管随着系统复杂性增加,新的接口也在逐步补充和优化其功能。
NOTEUNIX 的核心哲学之一是“一切皆文件”。
自底向上的操作系统进程
什么是进程
所谓进程——
——从理论角度看,是对正在运行的程序过程的抽象;
——从实现角度看,是一种数据结构,目的在于清晰地刻画动态系统的内在规律,有效管理和调度进入计算机系统主存储器运行的程序。
要我说,进程就像写字楼里的工作间,所有的文件和工具都被陈列出来,一个程序可以任意地在工作间里工作,一旦操作系统需要做新的工作,就会给新的工作间招聘一个员工,等他干完活就给开了…
进程 vs. 程序
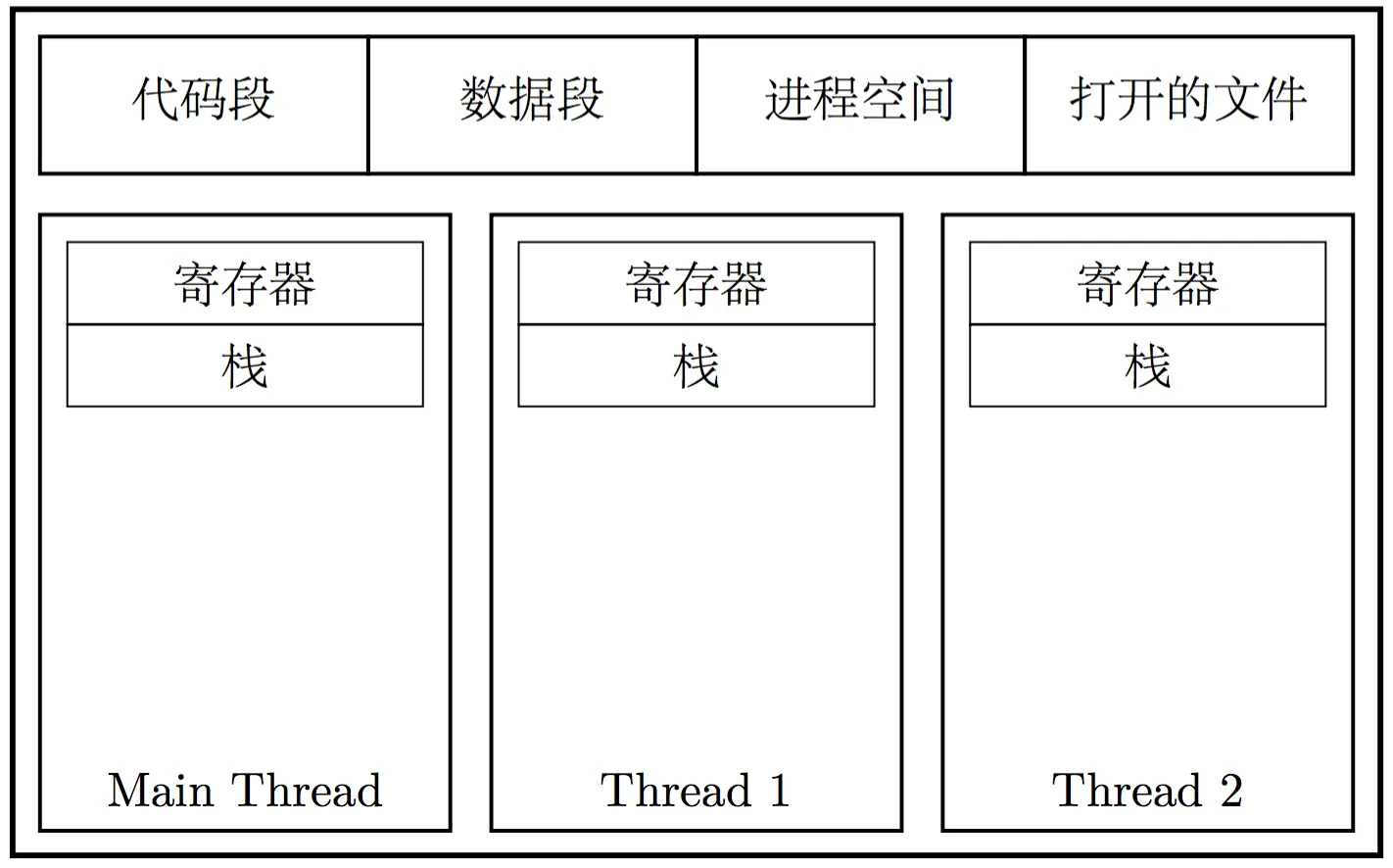
上面我们展示了task_struct中的进程PCB,未免有些过于复杂。其实简单来说,进程不过三个部分:代码段、数据段、堆栈段。对应到Linux进程中就是:程序、数据、进程控制块PCB。
相比于”程序”本身,“进程”更多的是提供一种对程序的管理方式,提供了一些就像是它们的 “身份标签” 和 “行为准则”的属性。
- 程序是一组指令的集合,它静态存储于诸如磁盘之类的存储器里;
- 当一个程序被操作系统执行时,它就会被载入内存空间,并在逻辑上产生一个独立的实例,这就是进程。
比如,每个进程都有一个唯一的进程标识符(PID),这就好比每个人的身份证号码,系统通过 PID 来识别和管理不同的进程。
进程还有自己的状态,常见的状态包括运行态(R)、睡眠态(S)、停止态(T)和僵尸态(Z)等 。运行态表示进程正在 CPU 上执行或准备执行;睡眠态则是进程在等待某个事件的完成,比如等待 I/O 操作结束;停止态是进程被暂停,通常是因为接收到了特定的信号;僵尸态比较特殊,当子进程结束运行但父进程没有回收其资源时,子进程就会进入僵尸态。
进程的优先级也很重要,它决定了进程获取 CPU 时间的先后顺序。优先级高的进程会优先被调度执行,就像在医院里,急诊病人会比普通病人优先得到救治一样。在 Linux 系统中,进程的优先级可以通过 nice 值来调整,nice 值的范围是 -20 到 19,值越小优先级越高。不过,普通用户只能在一定范围内调整自己进程的 nice 值,而 root 用户则拥有更大的权限。
线程基础
层次化
计算机科学领域的黄金法则:
计算机科学领域的任何问题,都可以通过增加一个间接的中间层来解决。 Any problem in computer science could be solved by another layer of indirection.
进程也是在这种层次化的思路被发明的。
交给计算机的任务,大致可以分为两类:I/O 密集型任务和 CPU 密集型任务。
所谓CPU 密集型任务,在执行过程中,需要大量的 CPU 资源。对于这种任务,我们可以大胆地将 CPU 资源交给它来调用——反正总是要占用 CPU 资源的。
相对应的,涉及到磁盘 I/O、网络存取的任务,就都是 I/O 密集型任务;此类任务往往不需要太多 CPU 资源,对于 CPU 来说,大多数时间被空耗在等待 I/O 完成上了。
当人们认识到交给计算机的任务可以分为这两类的时候,人们就开始考虑如何做 CPU 的任务调度。毕竟我们不能让IO密集时,CPU却长久地闲置着。在任务调度上,人们经历了 多道程序 、分时系统与多任务系统等阶段。
前两者超出了我们的讨论范围。在多任务系统中,操作系统接管了所有硬件资源并持有对硬件控制的最高权限。在操作系统中执行的程序,都以进程的方式运行在更低的权限中。所有的硬件资源,由操作系统根据进程的优先级以及进程的运行状况进行统一的调配。
然而,随着 CPU 频率增长逐渐停滞,CPU 开始向多核的方向发展。为了让多个 CPU 核心同时为我们工作,并行地执行任务,就需要涉及线程的概念。线程的英文是 Thread,有时也称为轻量级进程 (Lightweight Process),它是操作系统进行任务调度的最小单元。线程存活于进程之中;同一个进程中的线程,共享一个虚拟内存空间,以及其中的资源;线程之间各自持有自己的线程 ID、当前指令的指针(PC)、寄存器集合以及栈。
3种线程实现机制
内核态线程实现 :在内核空间实现的线程,由内核直接管理直接管理线程。
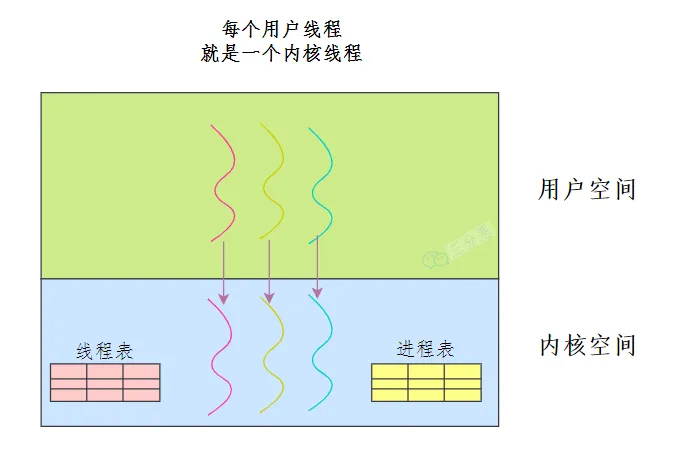
⽤户态线程实现 :在⽤户空间实现线程,不需要内核的参与,内核对线程无感知。
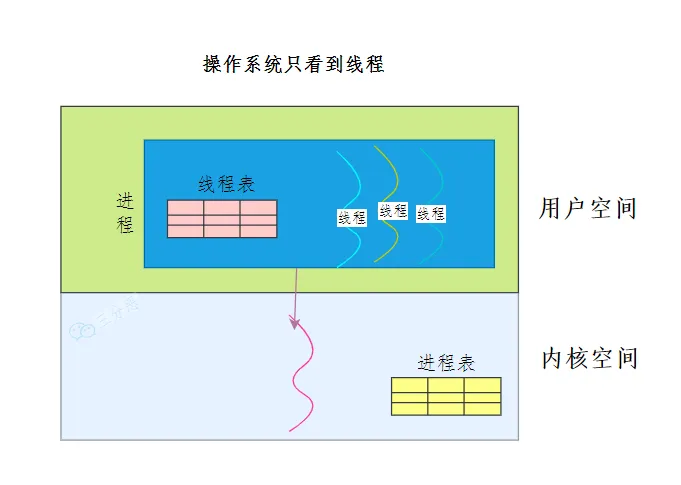
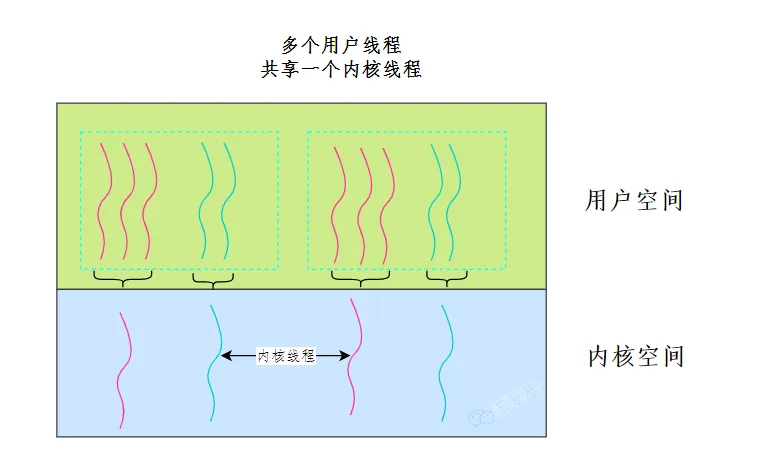
混合线程实现 :现代操作系统基本都是将两种方式结合起来使用。
用户态的执行系统负责进程内部线程在非阻塞时的切换;内核态的操作系统负责阻塞线程的切换。即我们同时实现内核态和用户态线程管理。其中内核态线程数量较少,而用户态线程数量较多。每个内核态线程可以服务一个或多个用户态线程。
进程 vs. 线程
线程具有以下特点:
- 每个线程都拥有独立的堆栈,这个堆栈与线程的寄存器的值共同决定了线程的运行状态
- 线程在进程的上下文中运行,同一进程中的所有线程共享资源
- 内核调度的是线程而不是进程,用户级线程(例如纤程(fiber)、协程(coroutine)等)在内核级别不可见
每个进程在独立的地址空间中运行,不会直接影响其他进程。线程共享同一个进程的内存空间、全局变量和文件描述符。
进程切换需要保存和恢复大量的上下文信息,代价较高。线程切换相对较轻量,因为线程共享进程的地址空间,只需要保存和恢复线程私有的数据。
线程的生命周期由进程控制,进程终止时,其所有线程也会终止。
| 特性 | 进程 | 线程 |
|---|---|---|
| 地址空间 | 独立 | 共享 |
| 内存开销 | 高 | 低 |
| 上下文切换 | 慢,开销大 | 快,开销小 |
| 通信 | 需要 IPC 机制,开销较大 | 共享内存,直接通信 |
| 创建销毁 | 开销大,较慢 | 开销小,较快 |
| 并发性 | 低 | 高 |
| 崩溃影响 | 一个进程崩溃不会影响其他进程 | 一个线程崩溃可能导致整个进程崩溃 |
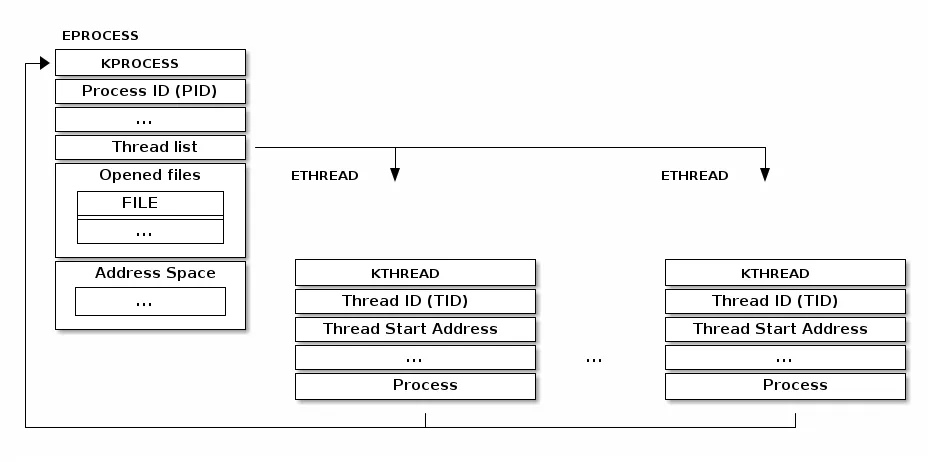
典型的线程实现是将线程实现为单独的数据结构,然后将其链接到进程数据结构。例如,Windows 内核就使用了这样的实现方式:
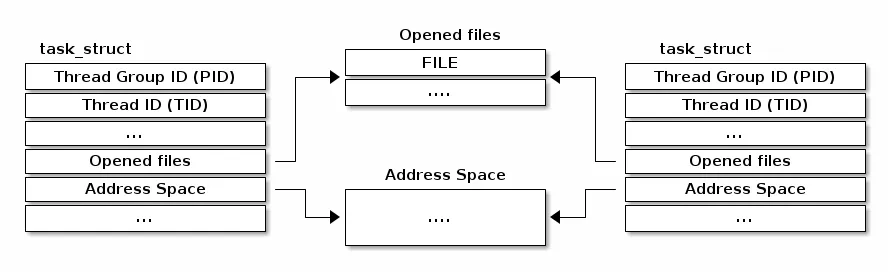
Linux 采用了不同的线程实现方式。其基本单位被称为“任务”(task)(因此其结构类型名为 struct task_struct),它既可以用于任务也可以用于进程。与将资源直接嵌入到任务结构体中的典型实现不同,它包含了指向这些资源的指针。
因此,如果两个线程属于同一个进程,它们将指向相同的资源结构体实例。如果两个线程属于不同进程,它们将指向不同的资源结构体实例。
通常来说,使用多线程会带来一下一些优势:
- 将等待 I/O 操作的时间,调度到其他线程执行,提高 CPU 利用率;
- 将计算密集型的操作留给工作线程,预留线程保持与用户的交互;
- 在多 CPU/多核计算机下,有效吃干计算能力;
- 相比多进程的程序,更有效地进行数据共享(在同一个进程空间)。
Linux 上的特殊进程
守护进程
守护进程,也被称为精灵进程,在后台持续运行,执行着各种重要的系统任务 。与普通进程不同,守护进程脱离于终端运行,这意味着它们不受终端的控制,也不会在终端上显示输出信息,即使终端关闭,守护进程依然能够继续运行 。
守护进程具有一些显著的特点。首先,它们在后台长期运行,通常在系统启动时就被自动启动,并且一直持续运行到系统关闭 。比如,系统日志守护进程syslogd,它负责收集和记录系统中的各种日志信息,从系统启动的那一刻起,它就开始默默地工作,记录着系统运行过程中的点点滴滴,为系统管理员提供了重要的故障排查和系统监控依据 。其次,守护进程没有控制终端,这使得它们能够独立运行,不依赖于用户的交互操作 。例如,网络守护进程sshd,它允许用户通过 SSH 协议远程登录到系统,即使没有用户在本地终端进行操作,sshd依然在后台监听网络端口,等待用户的连接请求,保障了远程管理的便捷性 。另外,守护进程通常以系统权限运行,这赋予了它们访问系统关键资源和执行重要任务的能力 。比如,cron守护进程,它负责执行周期性的任务,如定时备份文件、更新系统软件等,需要具备足够的权限来操作相关的文件和目录 。
在 Linux 系统中,有许多常见的守护进程。除了前面提到的syslogd、sshd和cron,还有httpd(Apache Web 服务器守护进程),它负责处理 Web 服务器的请求,使得我们能够在浏览器中访问网站;mysqld(MySQL 数据库服务器守护进程),它管理着 MySQL 数据库,为各种应用程序提供数据存储和检索服务 。这些守护进程在系统中各司其职,共同维持着系统的稳定运行 。
对于守护进程的管理,我们可以使用不同的工具和方法 。在基于 Systemd 的系统中,使用systemctl命令来管理守护进程非常方便 。比如,要启动httpd守护进程,可以使用 systemctl start httpd命令;要停止它,使用 systemctl stop httpd命令;要查看其状态,使用 systemctl status httpd命令 。如果希望httpd守护进程在系统启动时自动启动,可以使用 systemctl enable httpd命令;如果不想让它自动启动,则使用 systemctl disable httpd命令 。另外,对于一些简单的守护进程,我们也可以使用nohup命令来启动,它可以让进程在后台运行,并且忽略挂断信号 。例如,nohup my_daemon &可以将my_daemon这个守护进程在后台启动,输出信息会被重定向到nohup.out文件中 。还有supervisor,它是一个功能强大的进程管理工具,可以方便地管理和监控守护进程 。通过配置supervisor的配置文件,我们可以定义守护进程的启动命令、自动重启策略、日志输出等 。比如,在 /etc/supervisor/conf.d/目录下创建一个守护进程的配置文件,然后使用 supervisorctl命令来启动、停止、重启守护进程,还可以查看其状态和日志 。
僵尸进程与孤儿进程
在 Linux 进程里,僵尸进程和孤儿进程是两种比较特殊的进程状态,它们有着独特的产生原因和特点。
僵尸进程是指子进程已经终止运行,但父进程没有调用wait或waitpid函数来获取子进程的退出状态信息,此时子进程就会变成僵尸进程 。从系统的角度看,僵尸进程虽然已经不再占用 CPU 等运行资源,但它的进程描述符仍然保留在系统中,占用着进程表的一个位置 。如果系统中存在大量的僵尸进程,会导致进程号资源被大量占用,因为系统所能使用的进程号是有限的,当进程号耗尽时,系统将无法创建新的进程,这会对系统的正常运行造成严重影响 。
例如,我们来看下面这段 C 代码:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int main() {
pid_t pid = fork();
if (pid < 0) {
perror("fork");
exit(1);
} else if (pid == 0) {
// 子进程
printf("Child process, PID: %d\n", getpid());
exit(0);
} else {
// 父进程
printf("Parent process, PID: %d\n", getpid());
while (1) {
sleep(1);
}
}
return 0;
}在这段代码中,父进程创建子进程后,子进程很快退出,但父进程没有调用 wait或 waitpid来处理子进程的退出,此时子进程就会变成僵尸进程 。我们可以通过 ps -aux命令查看进程状态,会发现处于僵尸状态的子进程,其状态字段显示为Z 。
为了避免僵尸进程的产生,我们可以采取一些措施 。一种方法是在父进程中调用 wait或 waitpid函数来等待子进程的结束,并获取其退出状态信息 。wait函数会使父进程阻塞,直到有子进程结束;waitpid函数则更加灵活,可以指定等待特定的子进程,并且可以设置非阻塞模式 。例如:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/wait.h>
int main() {
pid_t pid = fork();
if (pid < 0) {
perror("fork");
exit(1);
} else if (pid == 0) {
// 子进程
printf("Child process, PID: %d\n", getpid());
exit(0);
} else {
// 父进程
printf("Parent process, PID: %d\n", getpid());
int status;
waitpid(pid, &status, 0);
printf("Child process has exited\n");
}
return 0;
}在这个改进的代码中,父进程调用了 waitpid函数等待子进程结束,这样就不会产生僵尸进程 。
另一种避免僵尸进程的方法是利用信号机制 。当子进程结束时,会向父进程发送 SIGCHLD信号,我们可以在父进程中注册 SIGCHLD信号的处理函数,在处理函数中调用 wait或 waitpid来处理子进程的退出 。例如:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/wait.h>
#include <signal.h>
void sigchld_handler(int signo) {
pid_t pid;
int status;
while ((pid = waitpid(-1, &status, WNOHANG)) > 0) {
printf("Child process %d has exited\n", pid);
}
}
int main() {
struct sigaction sa;
sa.sa_handler = sigchld_handler;
sigemptyset(&sa.sa_mask);
sa.sa_flags = SA_RESTART;
if (sigaction(SIGCHLD, &sa, NULL) == -1) {
perror("sigaction");
exit(1);
}
pid_t pid = fork();
if (pid < 0) {
perror("fork");
exit(1);
} else if (pid == 0) {
// 子进程
printf("Child process, PID: %d\n", getpid());
exit(0);
} else {
// 父进程
printf("Parent process, PID: %d\n", getpid());
while (1) {
sleep(1);
}
}
return 0;
}在这段代码中,通过 sigaction函数注册了 SIGCHLD信号的处理函数 sigchld_handler,当子进程结束时,会调用该处理函数来处理子进程的退出,从而避免了僵尸进程的产生 。
孤儿进程则是指父进程在子进程之前退出,导致子进程失去了父进程的管理,此时子进程就成为了孤儿进程 。在 Linux 系统中,孤儿进程会被 init进程(在 systemd 系统中通常是systemd进程)收养,init进程会负责回收孤儿进程的资源 。例如,下面这段代码:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int main() {
pid_t pid = fork();
if (pid < 0) {
perror("fork");
exit(1);
} else if (pid == 0) {
// 子进程
printf("Child process, PID: %d, PPID: %d\n", getpid(), getppid());
sleep(5);
printf("Child process, PID: %d, PPID: %d\n", getpid(), getppid());
} else {
// 父进程
printf("Parent process, PID: %d\n", getpid());
exit(0);
}
return 0;
}在这个例子中,父进程创建子进程后立即退出,子进程在睡眠 5 秒前后查看自己的父进程 ID,会发现父进程 ID 变成了init进程的 ID(通常为 1),说明子进程已经被init进程收养,成为了孤儿进程 。
孤儿进程本身对系统并没有太大的危害,因为init进程会妥善处理它们的资源回收 。但在某些情况下,我们可能需要对孤儿进程进行特殊的处理或监控 。比如,如果我们希望在孤儿进程中执行一些特定的清理操作,可以在子进程中检测父进程是否已经退出,如果发现父进程退出,就执行相应的清理代码 。例如:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
int main() {
pid_t pid = fork();
if (pid < 0) {
perror("fork");
exit(1);
} else if (pid == 0) {
// 子进程
sleep(1);
if (getppid() == 1) {
printf("I am an orphan process. Performing clean-up...\n");
// 执行清理操作
}
while (1) {
sleep(1);
}
} else {
// 父进程
printf("Parent process, PID: %d\n", getpid());
exit(0);
}
return 0;
}在这段代码中,子进程在睡眠 1 秒后检查自己的父进程 ID,如果发现父进程 ID 为 1,说明自己成为了孤儿进程,然后执行相应的清理操作 。
上下文切换
进程
以下图表展示了 Linux 内核上下文切换过程的概述:
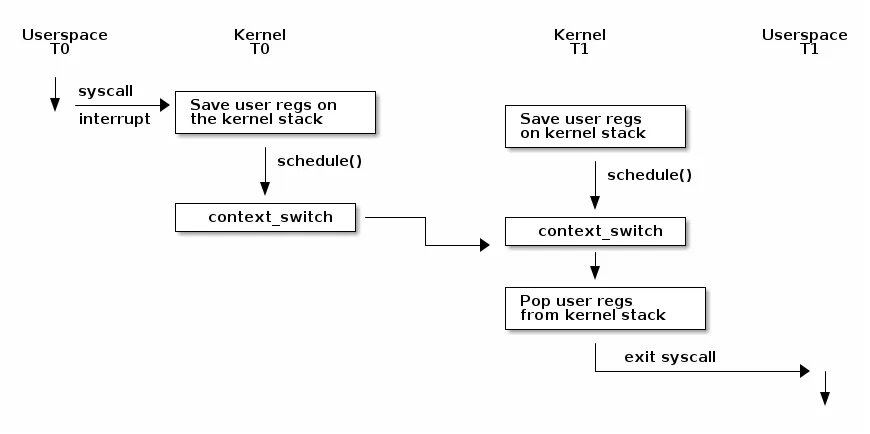
注意,在发生上下文切换之前,我们必须进行内核转换,这可以通过系统调用或中断来实现。此时,用户空间的寄存器会保存在内核堆栈上。在某个时刻,可能会调用 schedule()函数,该函数决定从线程 T0 切换到线程 T1(例如,因为当前线程正在阻塞等待 I/O 操作完成,或者因为它的时间片已经耗尽)。
此时,context_switch()函数将执行特定于体系结构的操作,并在需要时切换地址空间:
static __always_inline struct rq *
context_switch(struct rq *rq, struct task_struct *prev,
struct task_struct *next, struct rq_flags *rf)
{
prepare_task_switch(rq, prev, next);
/*
* paravirt 中,这与 switch_to 中的 exit 配对,
* 将页表重载和后端切换合并为一个超级调用(hypercall)。
*/
arch_start_context_switch(prev);
/*
* kernel -> kernel lazy + transfer active
* user -> kernel lazy + mmgrab() active
*
* kernel -> user switch + mmdrop() active
* user -> user switch
*/
if (!next->mm) { // 到内核
enter_lazy_tlb(prev->active_mm, next);
next->active_mm = prev->active_mm;
if (prev->mm) // 来自用户
mmgrab(prev->active_mm);
else
prev->active_mm = NULL;
} else { // 到用户
membarrier_switch_mm(rq, prev->active_mm, next->mm);
/*
* sys_membarrier() 在设置 rq->curr / membarrier_switch_mm() 和返回用户空间之间需要一个 smp_mb()。
*
* 下面通过 switch_mm() 或者在 'prev->active_mm == next->mm' 的情况下通过 finish_task_switch() 的 mmdrop() 来提供这个功能。
*/
switch_mm_irqs_off(prev->active_mm, next->mm, next);
if (!prev->mm) { // 来自内核
/* 在 finish_task_switch() 中进行 mmdrop()。 */
rq->prev_mm = prev->active_mm;
prev->active_mm = NULL;
}
}
rq->clock_update_flags &= ~(RQCF_ACT_SKIP|RQCF_REQ_SKIP);
prepare_lock_switch(rq, next, rf);
/* 在这里我们只切换寄存器状态和堆栈。 */
switch_to(prev, next, prev);
barrier();
return finish_task_switch(prev);
}它将调用特定于架构的 switch_to宏实现来切换寄存器状态和内核堆栈。请注意,寄存器被保存在堆栈上,并且堆栈指针被保存在 task_struct中:
#define switch_to(prev, next, last) \
do { \
((last) = __switch_to_asm((prev), (next))); \
} while (0)
/*
* %eax: prev task
* %edx: next task
*/
.pushsection .text, "ax"
SYM_CODE_START(__switch_to_asm)
/*
* 保存被调用者保存的寄存器
* 其必须与 struct inactive_task_frame 中的顺序匹配
*/
pushl %ebp
pushl %ebx
pushl %edi
pushl %esi
/*
* 保存标志位以防止 AC 泄漏。如果 objtool 支持 32 位,则可以消除此项需求,以验证 STAC/CLAC 的正确性。
*/
pushfl
/* 切换堆栈 */
movl %esp, TASK_threadsp(%eax)
movl TASK_threadsp(%edx), %esp
#ifdef CONFIG_STACKPROTECTOR
movl TASK_stack_canary(%edx), %ebx
movl %ebx, PER_CPU_VAR(stack_canary)+stack_canary_offset
#endif
#ifdef CONFIG_RETPOLINE
/*
* 当从较浅的调用堆栈切换到较深的堆栈时,RSB 可能会下溢或使用填充有用户空间地址的条目。
* 在存在这些问题的 CPU 上,用捕获推测执行的条目覆盖 RSB,以防止攻击。
*/
FILL_RETURN_BUFFER %ebx, RSB_CLEAR_LOOPS, X86_FEATURE_RSB_CTXSW
#endif
/* 恢复任务的标志位以恢复 AC 状态。 */
popfl
/* 恢复被调用者保存的寄存器 */
popl %esi
popl %edi
popl %ebx
popl %ebp
jmp __switch_to
SYM_CODE_END(__switch_to_asm)
.popsection线程
对于线程,上下文切换只是对进程上下文切换进行了一个决策优化:
- 当两个线程不是属于同⼀个进程,则切换的过程就跟进程上下⽂切换⼀样;
- 当两个线程是属于同⼀个进程,因为虚拟内存是共享的,所以在切换时,虚拟内存这些资源就保持不动,只需要切换线程的私有数据、寄存器等不共享的数据 ;
所以,线程的上下⽂切换相⽐进程,开销要⼩很多。
线程安全
Task的阻塞与唤醒
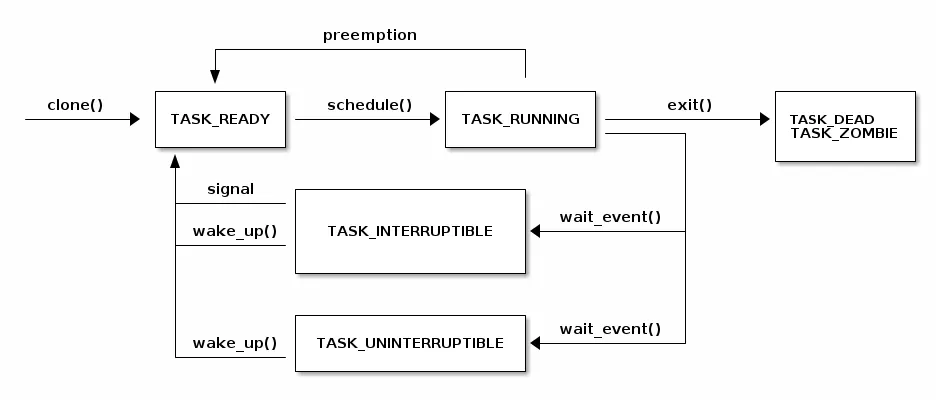
以下图表显示了任务(线程)的状态及其之间可能的转换:
阻塞
阻塞当前线程是一项重要的操作,我们需要执行它来实现高效的任务调度——我们希望在 I/O 操作完成时运行其他线程。
为了实现这一目标,需要执行以下操作:
- 将当前线程状态设置为 TASK_UINTERRUPTIBLE 或 TASK_INTERRUPTIBLE
- 将任务添加到等待队列中
- 调用调度程序,从 READY 队列中选择一个新任务
- 进行上下文切换到新任务
以下是对 wait_event 的实现的一些代码片段。请注意,等待队列是一个带有额外信息(如指向任务结构体的指针)的列表。
注意,为了确保在 wait_event 和 wake_up 之间不会发生死锁,任务会在检查 condition 之前被添加到列表中,并且调用 schedule() 之前会进行信号(signal)检查。
/**
* wait_event——在条件为真之前一直保持睡眠状态
* @wq_head: 等待队列
* @condition: 用于等待的事件的 C 表达式
*
* 进程会进入睡眠状态(TASK_UNINTERRUPTIBLE),直到 @condition 为真为止。
* 每次唤醒等待队列 @wq_head 时,都会检查 @condition。
*
* 在更改任何可能改变等待条件结果的变量后,必须调用 wake_up()。
*/
#define wait_event(wq_head, condition) \
do { \
might_sleep(); \
if (condition) \
break; \
__wait_event(wq_head, condition); \
} while (0)
#define __wait_event(wq_head, condition) \
(void)___wait_event(wq_head, condition, TASK_UNINTERRUPTIBLE, 0, 0, \
schedule())
/*
* 下面的宏 ___wait_event() 在 wait_event_*() 宏中使用时,有一个显式的 __ret
* 变量的影子。
*
* 这是为了两者都可以使用 ___wait_cond_timeout() 结构来包装条件。
*
* wait_event_*() 中 __ret 变量的类型不一致也是有意而为的;我们在可以返回超时值的情况下使用 long,否则使用 int。
*/
#define ___wait_event(wq_head, condition, state, exclusive, ret, cmd) \
({ \
__label__ __out; \
struct wait_queue_entry __wq_entry; \
long __ret = ret; /* 显式影子变量 */ \
\
init_wait_entry(&__wq_entry, exclusive ? WQ_FLAG_EXCLUSIVE : 0); \
for (;;) { \
long __int = prepare_to_wait_event(&wq_head, &__wq_entry, state);\
\
if (condition) \
break; \
\
if (___wait_is_interruptible(state) && __int) { \
__ret = __int; \
goto __out; \
} \
\
cmd; \
} \
finish_wait(&wq_head, &__wq_entry); \
__out: __ret; \
})
void init_wait_entry(struct wait_queue_entry *wq_entry, int flags)
{
wq_entry->flags = flags;
wq_entry->private = current;
wq_entry->func = autoremove_wake_function;
INIT_LIST_HEAD(&wq_entry->entry);
}
long prepare_to_wait_event(struct wait_queue_head *wq_head, struct wait_queue_entry *wq_entry, int state)
{
unsigned long flags;
long ret = 0;
spin_lock_irqsave(&wq_head->lock, flags);
if (signal_pending_state(state, current)) {
/*
* 如果被唤醒选择的是独占等待者,那么它不能失败,
* 它应该“消耗”我们等待的条件。
*
* 调用者将重新检查条件,并在我们已被唤醒时返回成功,我们不能错过事件,因为唤醒会锁定/解锁相同的 wq_head->lock。
*
* 但是我们需要确保在设置条件后+之后的唤醒看不到我们,如果我们失败的话,它应该唤醒另一个独占等待者。
*/
list_del_init(&wq_entry->entry);
ret = -ERESTARTSYS;
} else {
if (list_empty(&wq_entry->entry)) {
if (wq_entry->flags & WQ_FLAG_EXCLUSIVE)
__add_wait_queue_entry_tail(wq_head, wq_entry);
else
__add_wait_queue(wq_head, wq_entry);
}
set_current_state(state);
}
spin_unlock_irqrestore(&wq_head->lock, flags);
return ret;
}
static inline void __add_wait_queue(struct wait_queue_head *wq_head, struct wait_queue_entry *wq_entry)
{
list_add(&wq_entry->entry, &wq_head->head);
}
static inline void __add_wait_queue_entry_tail(struct wait_queue_head *wq_head, struct wait_queue_entry *wq_entry)
{
list_add_tail(&wq_entry->entry, &wq_head->head);
}
/**
* finish_wait - 在队列中等待后进行清理
* @wq_head: 等待的等待队列头
* @wq_entry: 等待描述符
*
* 将当前线程设置回运行状态,并从给定的等待队列中移除等待描述符(如果仍在队列中)。
*/
void finish_wait(struct wait_queue_head *wq_head, struct wait_queue_entry *wq_entry)
{
unsigned long flags;
__set_current_state(TASK_RUNNING);
/*
* 我们可以在锁之外检查链表是否为空,前提是:
* - 我们使用了“careful”检查,验证了 next 和 prev 指针,以确保没有我们还没有看到的其他 CPU 上可能仍在进行的半完成更新(可能仍会更改堆栈区域)。
* 并且
* - 所有其他用户都会获取锁(也就是说,只有一个其他 CPU 可以查看或修改链表)。
*/
if (!list_empty_careful(&wq_entry->entry)) {
spin_lock_irqsave(&wq_head->lock, flags);
list_del_init(&wq_entry->entry);
spin_unlock_irqrestore(&wq_head->lock, flags);
}
}唤醒
我们可以使用 wake_up 来唤醒任务。唤醒任务需要执行以下高级操作:
- 从等待队列中选择一个任务
- 将任务状态设置为 TASK_READY
- 将任务插入调度器的 READY 队列中
- 在 SMP 系统上,这是一个复杂的操作:每个处理器都有自己的队列,队列需要平衡,需要向 CPU 发送信号
#define wake_up(x) __wake_up(x, TASK_NORMAL, 1, NULL)
/**
* __wake_up - 唤醒在等待队列上阻塞的线程。
* @wq_head: 等待队列
* @mode: 哪些线程
* @nr_exclusive: 要唤醒的线程数(一次唤醒一个或一次唤醒多个)
* @key: 直接传递给唤醒函数
*
* 如果此函数唤醒了一个任务,则在访问任务状态之前执行完全的内存屏障。
*/
void __wake_up(struct wait_queue_head *wq_head, unsigned int mode,
int nr_exclusive, void *key) {
__wake_up_common_lock(wq_head, mode, nr_exclusive, 0, key);
}
static void __wake_up_common_lock(struct wait_queue_head *wq_head, unsigned int mode,
int nr_exclusive, int wake_flags, void *key) {
unsigned long flags;
wait_queue_entry_t bookmark;
bookmark.flags = 0;
bookmark.private = NULL;
bookmark.func = NULL;
INIT_LIST_HEAD(&bookmark.entry);
do {
spin_lock_irqsave(&wq_head->lock, flags);
nr_exclusive = __wake_up_common(wq_head, mode, nr_exclusive,
wake_flags, key, &bookmark);
spin_unlock_irqrestore(&wq_head->lock, flags);
} while (bookmark.flags & WQ_FLAG_BOOKMARK);
}
/*
* 核心唤醒函数。非独占唤醒(nr_exclusive == 0)会唤醒所有任务。如果是独占唤醒(nr_exclusive == 一个小正数),则唤醒所有非独占任务和一个独占任务。
*
* 在某些情况下,我们可能会尝试唤醒已经开始运行但不处于 TASK_RUNNING 状态的任务。在这种(罕见)情况下,try_to_wake_up() 会返回零,我们通过继续扫描队列来处理它。
*/
static int __wake_up_common(struct wait_queue_head *wq_head, unsigned int mode,
int nr_exclusive, int wake_flags, void *key,
wait_queue_entry_t *bookmark) {
wait_queue_entry_t *curr, *next;
int cnt = 0;
lockdep_assert_held(&wq_head->lock);
if (bookmark && (bookmark->flags & WQ_FLAG_BOOKMARK)) {
curr = list_next_entry(bookmark, entry);
list_del(&bookmark->entry);
bookmark->flags = 0;
} else
curr = list_first_entry(&wq_head->head, wait_queue_entry_t, entry);
if (&curr->entry == &wq_head->head)
return nr_exclusive;
list_for_each_entry_safe_from(curr, next, &wq_head->head, entry) {
unsigned flags = curr->flags;
int ret;
if (flags & WQ_FLAG_BOOKMARK)
continue;
ret = curr->func(curr, mode, wake_flags, key);
if (ret < 0)
break;
if (ret && (flags & WQ_FLAG_EXCLUSIVE) && !--nr_exclusive)
break;
if (bookmark && (++cnt > WAITQUEUE_WALK_BREAK_CNT) &&
(&next->entry != &wq_head->head)) {
bookmark->flags = WQ_FLAG_BOOKMARK;
list_add_tail(&bookmark->entry, &next->entry);
break;
}
}
return nr_exclusive;
}
int autoremove_wake_function(struct wait_queue_entry *wq_entry, unsigned mode, int sync, void *key) {
int ret = default_wake_function(wq_entry, mode, sync, key);
if (ret)
list_del_init_careful(&wq_entry->entry);
return ret;
}
int default_wake_function(wait_queue_entry_t *curr, unsigned mode, int wake_flags,
void *key) {
WARN_ON_ONCE(IS_ENABLED(CONFIG_SCHED_DEBUG) && wake_flags & ~WF_SYNC);
return try_to_wake_up(curr->private, mode, wake_flags);
}
/**
* try_to_wake_up——唤醒线程
* @p: 要唤醒的线程
* @state: 可以被唤醒的任务状态的掩码
* @wake_flags: 唤醒修改标志 (WF_*)
*
* 概念上执行以下操作:
*
* 如果 (@state & @p->state),则 @p->state = TASK_RUNNING。
*
* 如果任务没有放进队列/可运行,还将其放回运行队列。
*
* 此函数对 schedule() 是原子性的,后者会让该任务出列。
*
* 在访问 @p->state 之前,它会触发完整的内存屏障,请参阅 set_current_state() 的注释。
*
* 使用 p->pi_lock 来序列化与并发唤醒的操作。
*
* 依赖于 p->pi_lock 来稳定下来:
* - p->sched_class
* - p->cpus_ptr
* - p->sched_task_group
* 以便进行迁移,请参阅 select_task_rq()/set_task_cpu() 的使用。
*
* 尽力只获取一个 task_rq(p)->lock 以提高性能。
* 在以下情况下获取 rq->lock:
* - ttwu_runnable() -- 旧的 rq,不可避免的,参见该处的注释;
* - ttwu_queue() -- 新的 rq,用于任务入队;
* - psi_ttwu_dequeue() -- 非常遗憾 :-(,计数将会伤害我们。
*
* 因此,我们与几乎所有操作都存在竞争。有关详细信息,请参阅许多内存屏障及其注释。
*
* 返回值:如果 @p->state 改变(实际进行了唤醒),则为 %true,否则为 %false。
*/
static int
try_to_wake_up(struct task_struct *p, unsigned int state, int wake_flags)
{
...抢占/竞争
首先,我们回顾一下线程的特点:
- 每个线程有自己独立的栈;
- 同时多个线程共享进程空间中的数据。
如果每个线程对共享部分数据都是只读的,那么大概不会出现什么问题。但是,如果同时有多个线程尝试对同一份数据进行写入操作,那么最终的结果可能会是不可预期的。考虑这一经典的例子:
- 共享数据
int i = 0;; - 线程 1 试图执行
++i; - 线程 2 试图执行
--i。
由于这一句代码会被翻译成多条指令,那么必然存在这样的情况:线程 1 在执行三条指令的过程中被中断,系统调度线程 2 继续执行。这样,在两边线程执行完毕之后,变量 i 的值可能是 0, 1, -1;而具体取值多少是不可预期的。
这种 因为多个线程竞争对同一变量进行操作导致不可预期后果的过程,称为线程不安全 。
优秀的程序员不应该对任何不确定的代码做预测,即使一种情况相对另一种发生的概率几乎为0。
除了线程,CSAPP中还提到,Linux中的信号、进程、乃至各种分布式的概念也存在类似的竞争,这种竞争带来了不确定的程序运行结果。
这种不确定性的根本原因,是线程中多条指令连续执行的过程可能会被系统调度中断,而现场恢复之后共享变量的值可能已经被修改。因此,如果我们能保证指令的执行不被打断,那么自然就能保证线程安全了。这种特性被称作原子性。
显然,单条指令是不可打断的。那么对应单条指令的代码,都是具有原子性的。例如 i386 架构中,有一个 inc 指令,可以直接增加内存某个区域的值。这样一来,自增操作就是原子的了。
由单条指令提供的原子性,显然有非常大的局限性——这是因为单条指令能够达成的效果总是有限的。在实际生产中,我们会需要保证连续多条指令的原子性。这就需要引入同步和锁的概念。
同步与锁机制
同步(Sync)是一种规则,而锁(Lock)则是实现这种规则的具体方法。
所谓同步,指的是多线程程序里,多个线程不得同时对某一共享变量进行访问。锁是实现同步的一种具体方案——准确地说,这是一种非常强的方案。
锁有多种形式,最符合直觉的锁是所谓的 互斥量(Mutex) 。具体来说,线程在访问某个共享变量的时候,必须先获取锁;如果获取不到锁,那么就必须等待(或者进行其他操作,总之不许访问这个变量);在结束对这个变量的访问之后,持有锁的线程应当释放。
值得一提的是,锁作为一种同步手段,是非常强的。但是,这种强,仅限于逻辑层面。在实际情况中,编译器优化(尤其)、CPU 动态调度,都有可能打破锁对于同步的保护。这时候,这些优化就变成了过度优化。
举个例子:
int x = 0;
Thread 1 Thread 2
lock(); lock();
++x; ++x;
unlock(); unlock();对于共享的变量 x,我们在线程 1 和线程 2 中并发地尝试访问它。为了保证线程安全,我们在对它的访问前后加上了锁。
在逻辑上,这已经做到了线程安全,于是在执行完毕之后,x 的值应当必然是 2。但是,编译器优化可能会破坏逻辑上的线程安全:如果线程 1 在这之后会多次使用变量 x,那么编译器可能会将 x 自增后的值存放在寄存器中,暂不写回。于是,在线程 2 中尝试自增 x 的时候,获取到的 x 的值,可能是尚未从线程 1 的寄存器中更新值的 x。整个流程如下:
- 线程 1:获取锁
- 线程 1:从
x中读取数据,写入寄存器X - 线程 1:
X++ - 线程 1:释放锁
- 线程 2:获取锁
- 线程 2:从
x中读取数据,写入寄存器Y - 线程 2:
Y++ - 线程 2:从寄存器
Y中读取数据,写入x - 线程 2:释放锁
- 线程 1:(很久之后)从寄存器
X中读取数据,写入x
显而易见,最终 x 的值,取决于寄存器中 X 的值;而在这个例子中,它是 1。
对于这种情况,我们可以用 C 语言关键字 volatile。这个关键字能在两种情况下阻止编译器优化:
- 为了提高速度,将一个变量缓存到寄存器而不写回;
- 调整操作该变量的指令的顺序。
因此,在这个例子里,我们只需要使用 volatile int x = 0,就能保证 x 变量总是能得到即时的更新了。
线程同步实现
在操作系统层面,保证线程同步的方式有很多,除了锁,还有信号量等机制。
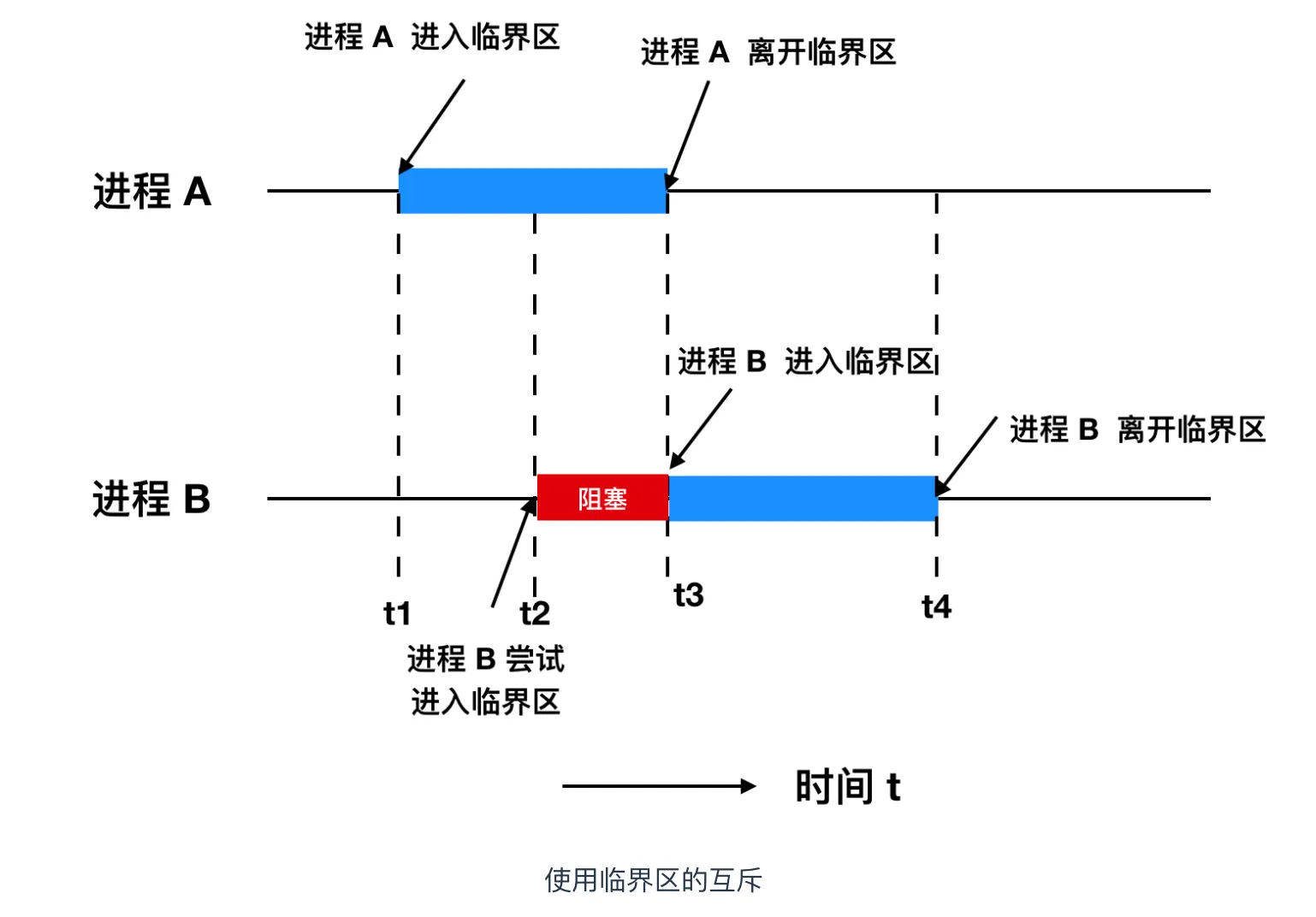
我们先来看看临界区的概念:
对共享资源访问的程序片段,我们希望这段代码是 互斥的,可以保证在某个时刻只能被一个线程执行,也就是说一个线程在临界区执行时,其它线程应该被阻止进入临界区。
临界区不仅针对线程,同样针对进程。
同步锁
任何想进⼊临界区的线程,必须先执⾏加锁操作。若加锁操作顺利通过,则线程可进⼊临界区;在完成对临界资源的访问后再执⾏解锁操作,以释放该临界资源。
加锁和解锁锁住的是什么呢?可以是 临界区对象,也可以只是一个简单的 互斥量,例如互斥量是 0无锁,1表示加锁。
根据锁的实现不同,可以分为 忙等待锁和 ⽆忙等待锁。
- 忙等待锁(也称为自旋锁,Spinlock)是指当一个线程试图获取锁时,如果该锁已经被其他线程持有,当前线程不会立即进入休眠或阻塞,而是不断地检查锁的状态,直到该锁可用为止。这个过程被称为忙等待(busy waiting),因为线程在等待锁时仍然占用 CPU 资源,处于活跃状态。优点是避免了线程的上下文切换。
- 无忙等待锁是指当一个线程尝试获取锁时,如果锁已经被其他线程持有,当前线程不会忙等待,而是主动让出 CPU,进入阻塞状态或休眠状态,等待锁释放。当锁被释放时,线程被唤醒并重新尝试获取锁。这类锁的主要目的是避免忙等待带来的 CPU 资源浪费。
信号量
信号量是操作系统提供的⼀种协调共享资源访问的⽅法。 通常表示资源的数量 ,对应的变量是⼀个整型(sem)变量。
另外,还有 两个原⼦操作的系统调⽤函数来控制信号量 ,分别是:
- P 操作:当线程想要进入临界区时,会尝试执行 P 操作。如果信号量的值大于 0,信号量值减 1,线程可以进入临界区;否则,线程会被阻塞,直到信号量大于 0。
- V 操作:当线程退出临界区时,执行 V 操作,信号量的值加 1,释放一个被阻塞的线程。
死锁
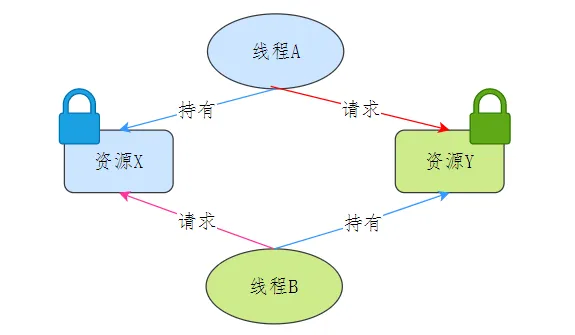
在两个或者多个并发线程中,如果每个线程持有某种资源,而又等待其它线程释放它或它们现在保持着的资源,在未改变这种状态之前都不能向前推进,称这一组线程产生了死锁。通俗的讲就是两个或多个线程无限期的阻塞、相互等待的一种状态。
产生死锁需要同时满足四个必要条件:
- 互斥条件 (Mutual Exclusion):资源不能被多个进程共享,即资源一次只能被一个进程使用。如果一个资源已经被分配给了一个进程,其他进程必须等待,直到该资源被释放。
- 持有并等待条件 (Hold and Wait):一个进程已经持有了至少一个资源,同时还在等待获取其他被占用的资源。在此期间,该进程不会释放已经持有的资源。
- 不可剥夺条件 (No Preemption):已分配给进程的资源不能被强制剥夺,只有持有该资源的进程可以主动释放资源。
- 循环等待条件 (Circular Wait):存在一个进程集合 P1,P2,…,Pn,其中 P1 等待 P2 持有的资源,P2 等待 P3 持有的资源,依此类推,直到 Pn 等待 P1 持有的资源,形成一个进程等待环。
避免死锁,破坏其中的一个就可以。
1. 消除互斥条件
无法实现,因为大部分资源只能被一个线程占用,例如锁。
2. 消除请求并持有条件
消除这个条件的办法很简单,就是一个线程一次请求其所需要的所有资源。
3. 消除不可剥夺条件
占用部分资源的线程进一步申请其他资源时,如果申请不到,可以主动释放它占有的资源,这样不可剥夺这个条件就破坏掉了。
4. 消除环路等待条件
可以靠按序申请资源来预防。所谓按序申请,是指资源是有线性顺序的,申请的时候可以先申请资源序号小的,再申请资源序号大的,这样线性化后就不存在环路了。
其他锁概念
饥饿锁:这个饥饿指的是资源饥饿,某个线程一直等不到它所需要的资源,从而无法向前推进,就像一个人因为饥饿无法成长。
活锁:在活锁状态下,处于活锁线程组里的线程状态可以改变,但是整个活锁组的线程无法推进。活锁可以用两个人过一条很窄的小桥来比喻:为了让对方先过,两个人都往旁边让,但两个人总是让到同一边。这样,虽然两个人的状态一直在变化,但却都无法往前推进。