

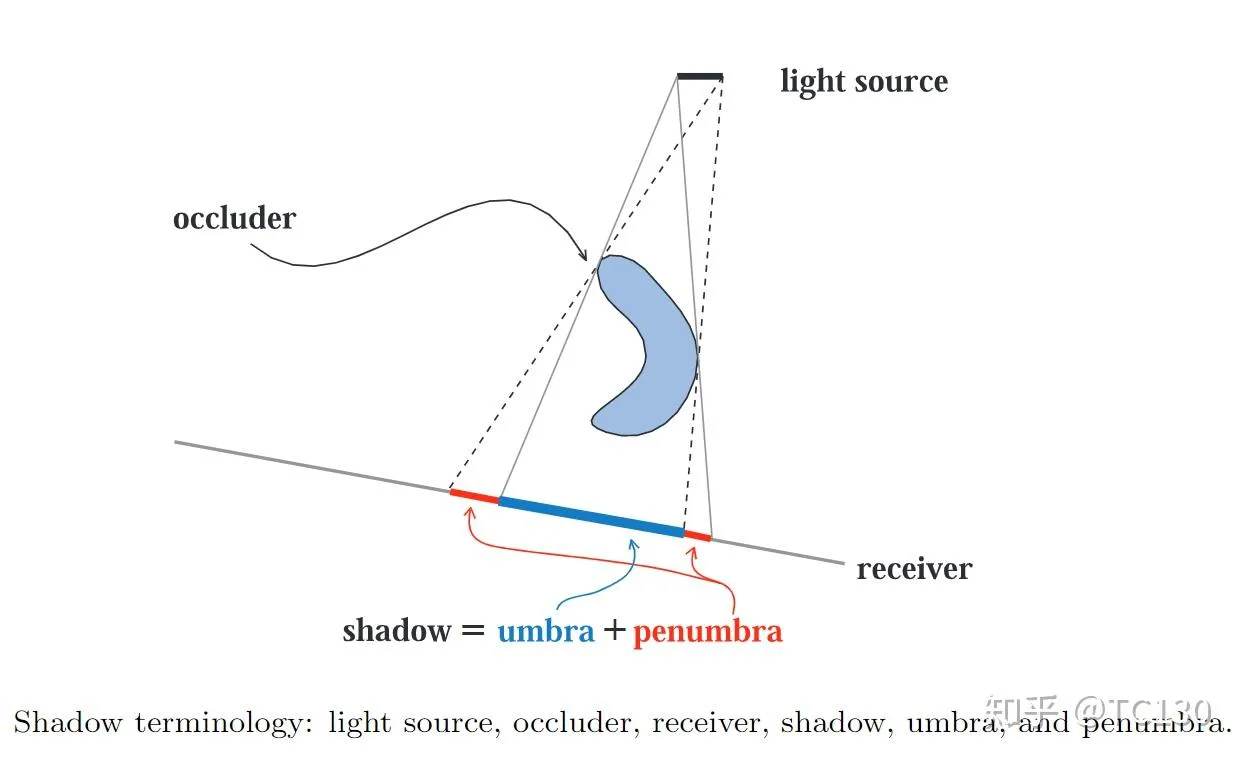
我们可以将阴影大致分成两个部分,全影 (umbra) 和 半影(penumbra) 。半影区域就是阴影的过渡区, 也就是软阴影,有半影的阴影过渡时,视觉效果会好很多。
对于静态的场景,我们可以选择将阴影烘焙到Lightmap中,或者直接画在贴图上。这篇文章,我们主要来介绍下动态阴影的相关技术,因为阴影是实时渲染中比较重要的技术,实现的方式也非常多。本篇文章,尽量覆盖到各种常用的阴影渲染技术。
简单的手绘假阴影
在手游或者2D游戏中上经常能看到这种做法,对于动态的角色,将阴影做成一张贴图,让后贴到脚下的地面上,虽然是很简单的形式,也能极大地增强真实感。

平面投射阴影
1. 平面投射阴影的计算
平面投射阴影,就是将需要投射阴影的物体再渲染一次,投射到地面上,来产生阴影。根据平面的位置,我们可以计算出一个投射的矩阵,直接将物体的坐标变换到平面上。
我们先来看简单的情况,如下图左边所示将阴影投射到x轴上的情况,我们在光源 的照射下,需要从点 投射阴影到点 ,根据三角形相似原理,我们可以简单地得到:
相应地,我们还可以算出 轴上的坐标为:,将结果整理成投影矩阵为:
这样可以通过矩阵计算投影坐标:。
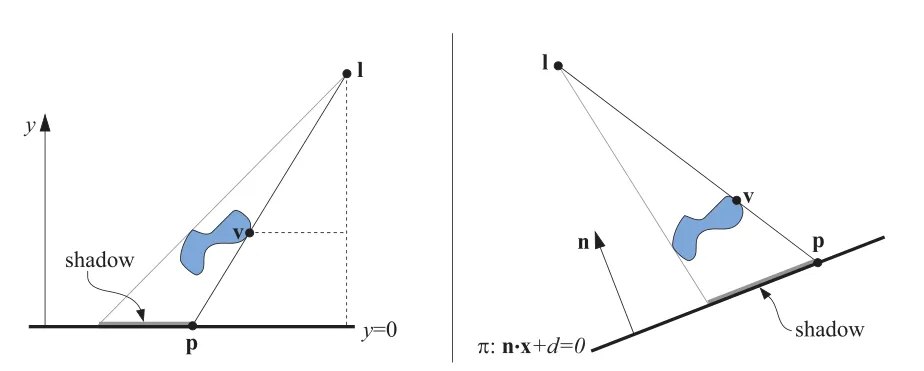
现在,我们看上图中右边这种更加一般的情况,在这种情况下,我们同样可以根据三角形相似原理,推导出投射阴影的坐标变换方程为:
从 点映射到 点:
令 ,推导后写成矩阵的形式:
如果是平行光源,计算的方式也是大致相同,并没有特别的难度。
在进行渲染时,我们可以选择先来渲染阴影,将投射阴影的物体,经过上述矩阵的变换到平面上,然后得到没有光照的黑色地面,此时同时把深度写入。然后再正常渲染地面和投射阴影的物体,为了使地面和阴影之间不会冲突,此时可以为深度值添加一些偏移。
添加偏移的方式可以直接通过图形 API 来添加,比如 OpgnGL 中的 glPolygonOffset 和 DirectX 中的 DepthBias设置。当然,你也可以选择在绘制阴影时添加偏移,绘制地面时正常绘制,最终的结果都是相同的。后面我们讲到的各种阴影技术,经常会用到添加偏移(bias)的技术。
另外一种安全的做法是,先正常渲染地面,然后渲染地面上的阴影,渲染阴影时将深度测试关闭,就不会产生深度冲突的问题。最后再渲染投射阴影的物体,这样可以防止阴影投射到非地面的区域。
如果接受阴影的地面不是一个无穷大的平面,则可能需要需要通过stencil buffer标记出需要接受阴影的部分,这样可以只让阴影产生在需要产生的平面上。
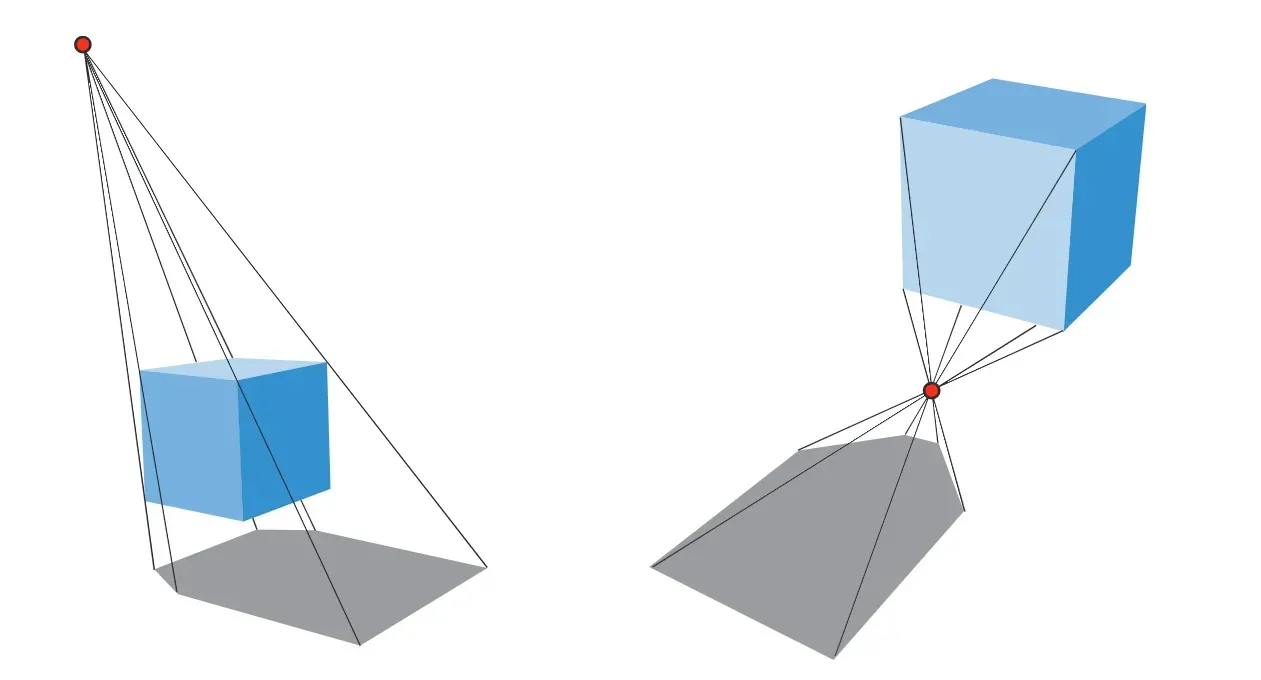
另外一个需要注意的情况,是如下图所示的情况,在进行计算时,需要保证投射阴影的物体,位于光源和接受阴影的地面之间,否则就会出现错误的阴影效果。
总的来说,这种直接投射阴影的方式,简单直接,适合直接投射在平面上的阴影。目前在手机游戏中,仍然有广泛的应用。
这种直接投射的阴影无法实现软阴影效果。而且由于我们是先渲染出的地面,再将影子的颜色乘以地面的颜色,这样其实并不是完全符合阴影产生的原理。
我们知道,阴影是由于地面没有受到光照而产生的,如果直接将地面的颜色乘以阴影,可能会产生不正确的阴影效果,特别是地面上有高光效果时。这类阴影叫做调制阴影(Modulated shadow),相对普通的阴影,开销要小一些。

2. 借助Texture的投射阴影
上面我们说到的投射阴影,是直接渲染到被投射的平面上,这样我们就无法实现软阴影的效果,因此我们这里将阴影先保存在一张贴图中,再从贴图中投射到平面上。这样还可以先得到阴影图,再渲染地面,得到正确的阴影效果。
和前面的直接投射相比,这种方式因为中间经过了一层转变,如果保存阴影的贴图分辨率很低,就可能会造成投射出来的结果有锯齿感。
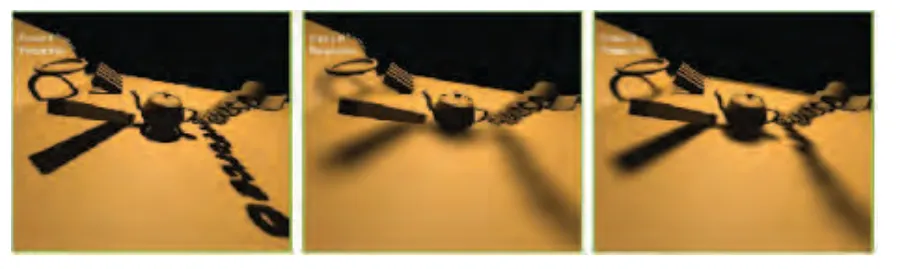
这样,我们就可以将贴图中的阴影先进行边缘模糊,再进行投射,就可以非常方便地得到软阴影效果。
上图为投射阴影实现的软阴影,先将阴影投射到贴图中,然后进行模糊,再投射至平面,实现软阴影效果
为了提升运行效率,我们还可以将多个物体的Texture打包到一个Shadow Atlas中,这样每个物体的投射阴影,占用整个大贴图的一部分。如果光源和投射阴影的物体都没有改变,我们甚至可以不用更新阴影,实现帧间阴影的复用。
Shadow Volume 阴影
shadow volume 以前是一种非常流行的阴影实现方案,目前在游戏中应用很少。但是它是后面我们将要讲到的 PerObject 阴影的基础,因此了解其原理是非常重要的。shadow volume 需要依赖 stencil buffer 来进行实现。
1. shadow volume
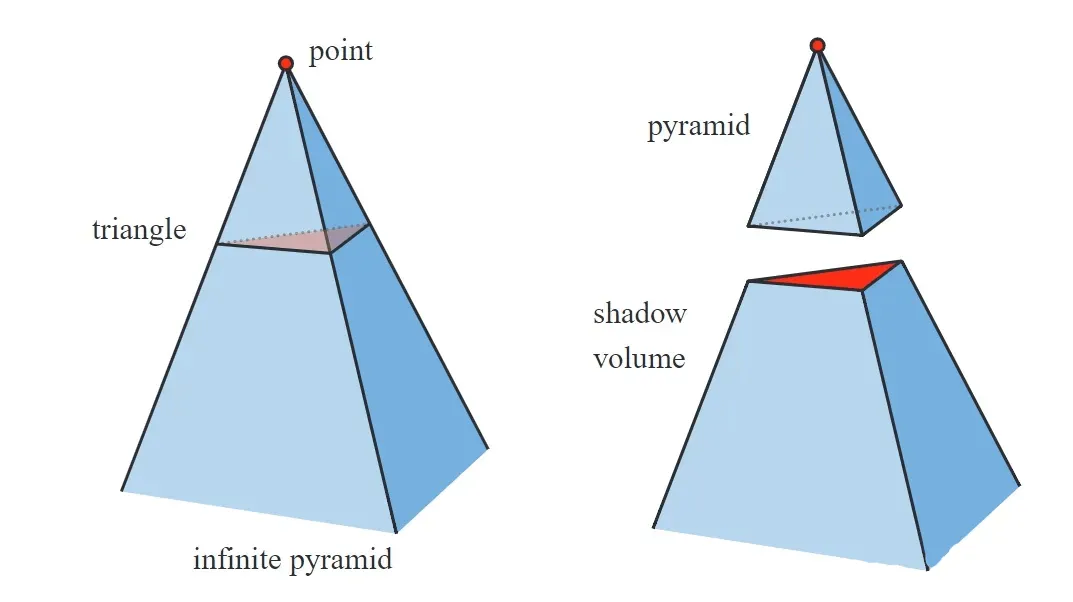
shadow volume 就是从光源沿着模型边缘拉伸至无限远处加上前盖后盖形成的形状。可以说,位于 shadowvolume 内部的物体,在渲染时具有阴影,在shadowvolume 外部的物体,在渲染时没有阴影。
2. ZPass算法
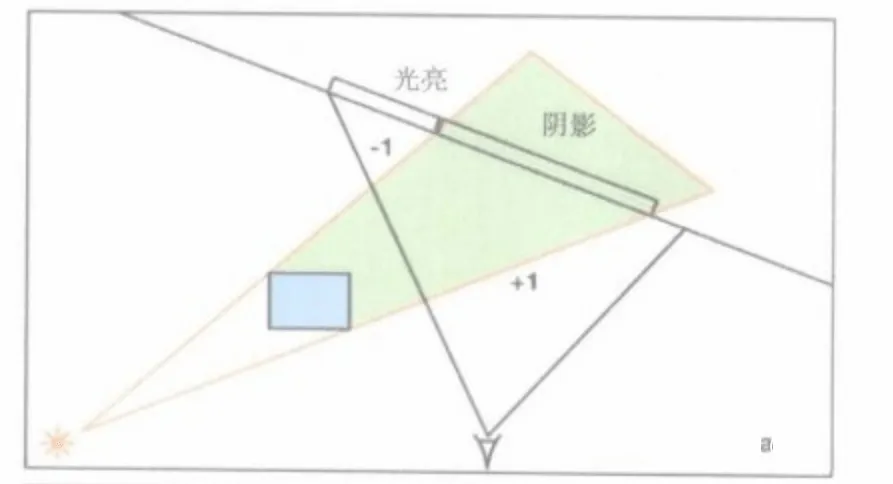
Shadow Volume阴影的原理就是取一条从视点到目标点的线,每次进入Shadow Volume,Stencil模板计数加一,每次离开计数减一,这样计数为0的部分就是无阴影的地方,计数不为0的地方就是有阴影的地方。
Shadow Volume的实现需要两个Pass,第一个Pass是标记具有阴影的区域,第二个Pass是进行阴影渲染。
第一个Pass,从视点渲染Shadow Volume几何体,屏幕中被Shadow Volume覆盖的区域,就是所有可能产生阴影的位置。我们这里使用Stencil Buffer来标记出实际具有阴影的位置:开启Z-Test,设置Stencil模式为正面部分+1,背面部分-1。这样渲染完成后,Stencil Buffer为0的部分就是无阴影的地方,Stencil Buffer中不为0的部分就是有阴影的地方。
第二个Pass,同样也是渲染Shadow Volume的几何体,不过此时直接关闭深度测试,使用模板测试,直接在上一步中标记出的位置渲染出阴影。
3. Z-Fail算法
ZPass算法有个缺陷,当摄影机在Shadow Volume中的时候,就会产生错误的结果。
当摄影机位于Shadow Volume中时,ZPass标记阴影区域失效:
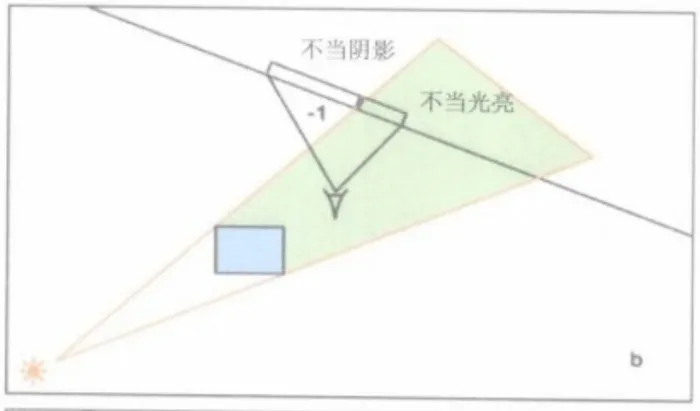
所以就有了Z-Fail的算法,Z-Fail算法和ZPass算法类似,只是改成从物体背面计数,在Z-Test fail的几何体部分,在进入Shdow Volume时计数-1,离开时计数+1,这样就可以规避这个缺陷。
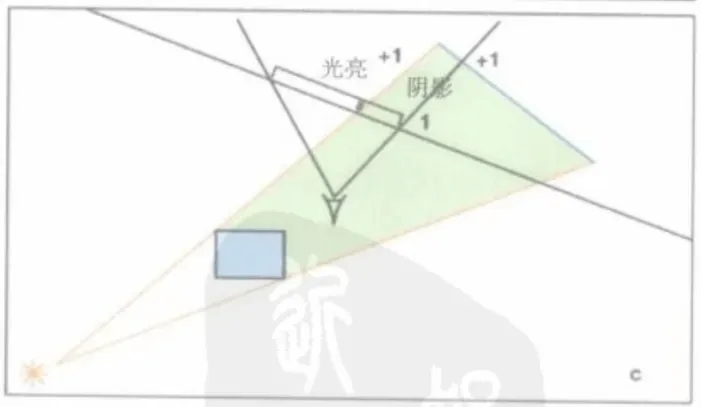
不过一般来说Z-Fail算法普遍要比ZPass算法慢,因为从背面渲染Shadow Volume,通常会覆盖更多的像素点。
因此在实践中,我们可以先做一个摄影机是否位于Shadow Volume中的判断,来决定使用ZPass或者是Z-Fail算法来进行标记阴影区域。
4. 生成阴影体的步骤
有一种最常见的生成Shadow Volume的方法,不过这种方法要求目标模型是封闭的多边形网格(没有空洞、裂隙、自相交)。
分为三部分:front capping 前盖-> back capping 后盖-> silhouette 轮廓拉伸成的侧面
front capping就是取模型中面向光源的三角面,方向判断可以通过判断面法线和光源方向的乘积的正负值来判断。
back capping就是取模型中背向光源的面,沿光源方向拉伸到无穷远处。
silhouette是判断两个临接面与光源方向不同的边,若认为是轮廓边,则将每条边扩展拉伸到无穷远处形成一个四边形面。
5. 在无穷远出的渲染
如何表示无穷远处的点?使用齐次坐标将w分量置为0,xyz表示方向即可。
如何避免图元在摄影机far clip plane外被裁剪掉?
一种方法是使用GL_DEPTH_CLAMP_NV扩展,将far plane外的点clamp到裁剪空间中。不过这个方法好像是只适用于OpenGL和NVIDIA显卡。
另外一种方法是稍微修改下摄影机的裁剪矩阵,将far plane设置为无穷远。
普通摄影机矩阵 (Standard Perspective Projection Matrix) :
远裁面在无穷远处处的摄影机矩阵 (Infinite Far Plane Projection Matrix):
当然精度或有微乎其微的减少。
6. 适用于非封闭模型的方法
把模型分成两部分,一部分是面向光源的面,一部分是背向光源的面,分别进行拉伸生成Shadow Volume,就可以支持非封闭模型。缺点是原来的轮廓边相当于生成了两次,造成性能浪费。
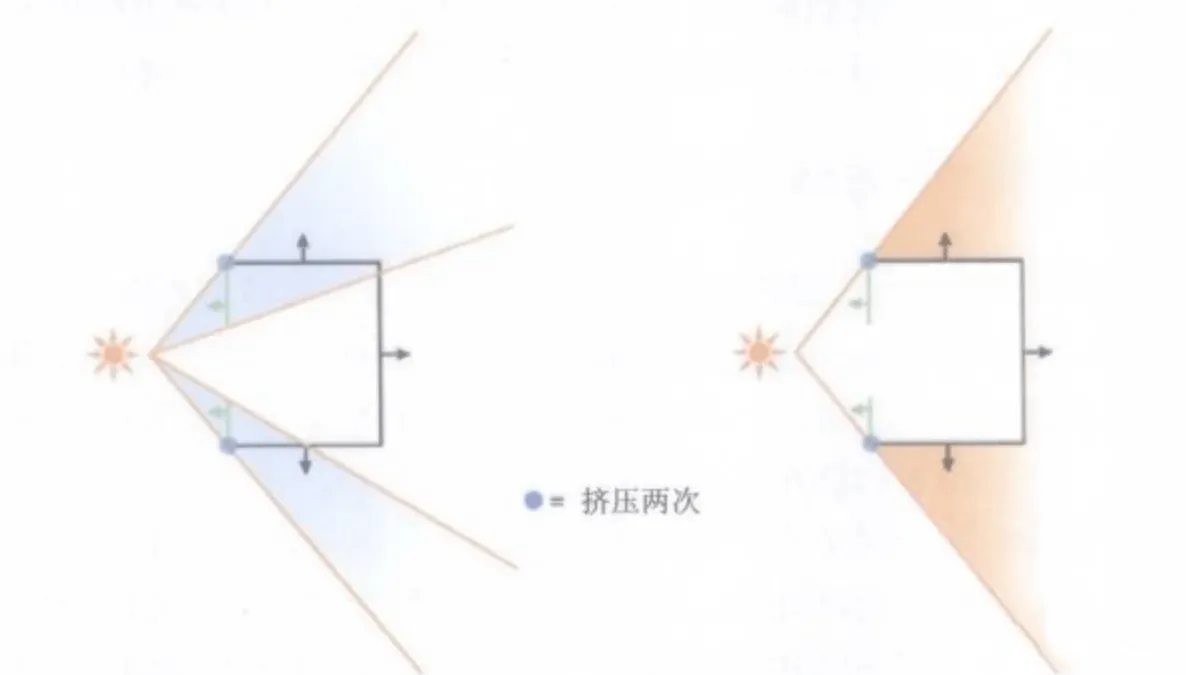
上图中,左边是面向光源面,右边是背向光源面,两个加在一起形成正确的结果。
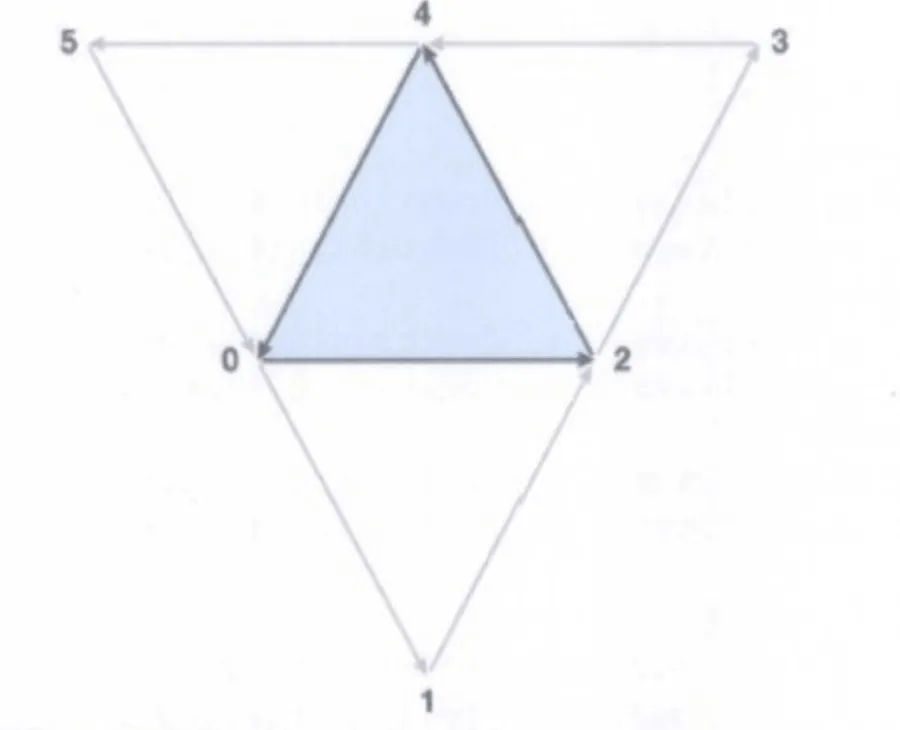
7. 使用Geometry Shader生成Shadow Volume
使用GS可以将生成Shadow Volume的工作移交给GPU,不过必须用TRIANGLE_STRIP的方式来输入模型。
使用GL_TRINGLES_ADJACENCY_EXT模式来向GS中输入三角形图元,就可以获取三角形的邻接面,以此在GS中进行轮廓边判断、输出Shdow Volume等操作。
Shadow Map——当前最主流的方式
1. shadowmap 的原理
当下应用最广泛最常见的方法,shadowmap 的使用,需要两个步骤。
假设我们现在要渲染带阴影的场景如下:

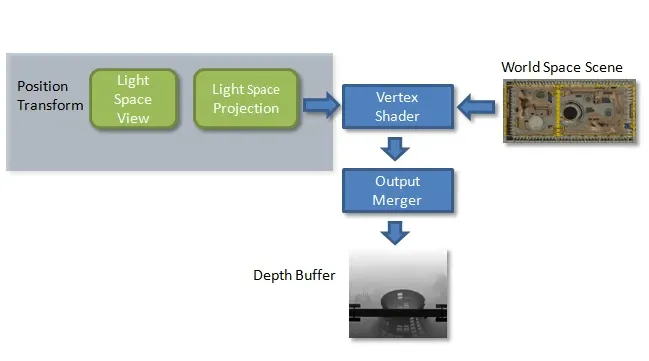
步骤1:从光源处出发,向光照的方向看去,来构造出光照空间。然后在光照空间,我们渲染需要产生阴影的物体,此时将深度写入到Z-Buffer中,得到保存最近处物体的深度值的Shdowmap。
步骤2:然后我们再次正常渲染物体,在渲染时,我们根据渲染物体的世界坐标,变换到上一阶段的光照空间坐标,再计算出该点在Shadowmap中的深度值并进行比较,如果相对光源的距离比Shadowmap中的深度要大,就说明该点处在阴影中,否则就说明不在阴影中。
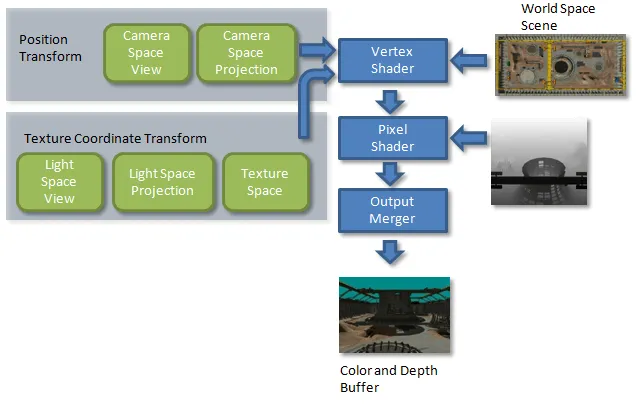
下图显示了整个Shadowmap工作的流程:
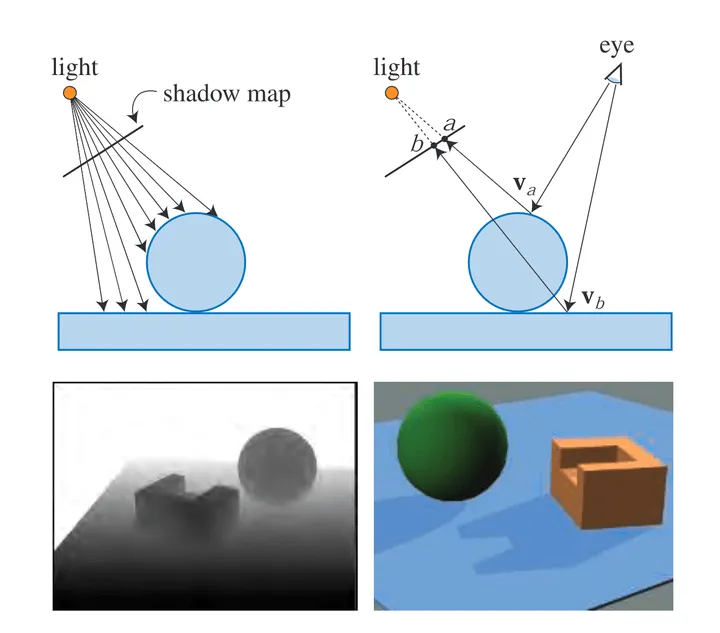
对于锥形光源,我们只需要沿着光照方向生成Shadowmap。对于类似太阳光的平行光源,我们就需要使用正交投影来进行计算深度,而且投影体的空间范围,需要包含我们的视锥空间。如果是点光源,就会更加复杂一点,为了能保存各个方向的深度值,我们一般需要使用Cubemap 。如果将一个物体进行六次渲染,每次渲染深度到每个面,那么渲染深度的开销就会比较大,因此我们一般会使用RenderTargetArray配合Gemotry Shader,一次性将一个物体的深度,同时写入到六个面上。
2. Light Space Frustrum的计算
Shadowmap的效果,一般会非常依赖于Shadowmap分辨率的大小和Z-Buffer的精度。因此我们要尽量提高Shadowmap的精度。
如果直接使用整个场景的AABB转化到Light Space,肯定是不行的,这样会造成很多不需要的阴影投射计算:
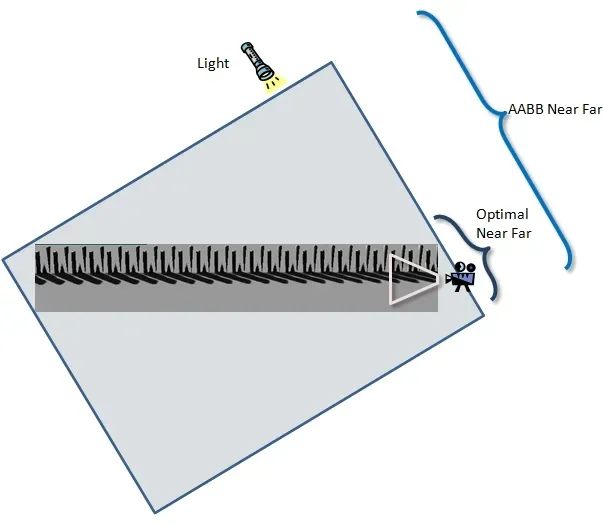
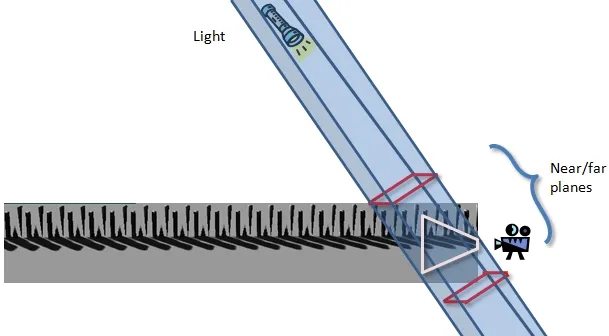
通常我们会使用下面的方式来计算Light Space Furstrum的边界大小。将世界空间视锥的八个顶点,变换到光照空间,算出在光照空间下,最远和最近的z值,并计算出AABB边界:
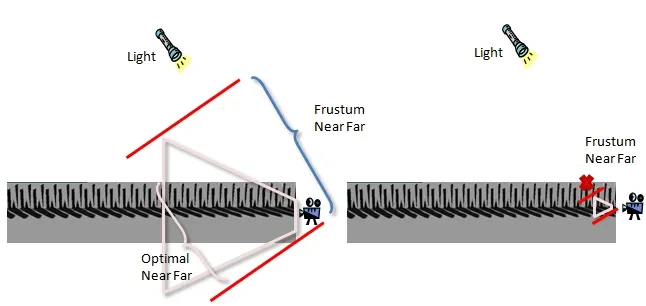
不过,这样也可能会造成另外一个问题,就是当摄影机的View Frustrum很小时,造成计算出来的Light Space Frustrum非常小,无法正确地投射所有需要投射阴影的物体。
因此我们还会根据整个场景的AABB空间,对得到的Light Space Frustrum进行扩展,使其能否覆盖到可能产生阴影的物体。当然,为了防止Light Space Frustrum的Near Plane 和Far Plane的值相差过大,我们还会在光照中设置一个最大阴影距离,当阴影投射物体,超出这个最大距离后,就不再投射阴影,来提高阴影的精度。
3. Shadow Bias处理自阴影走样
如下图所示,在进行阴影计算时出现了Self-shadow Aliasing/Shadow Acne,在计算自身的阴影时,因为在Shadowmap中存储的深度值,和物体自身的深度是相同的。因为在写入 Shadowmap时,我们计算的是Shadowmap像素中心点的深度值,这样在进行深度采样时,由于Shadowmap的精度限制,就会使比较的深度值产生误差,造成错误的渲染效果。
自阴影走样,右边是加了Bias的效果:
一种常见的解决自阴影误差的方式,是使用 Bias Factor ,对采样时的深度值,沿着光照的方向进行偏移。偏移的值可以是一个常量,这样计算起来比较方便,但是可能会在斜平面上继续产生误差,使用常量时叫做 Constant Bias 。
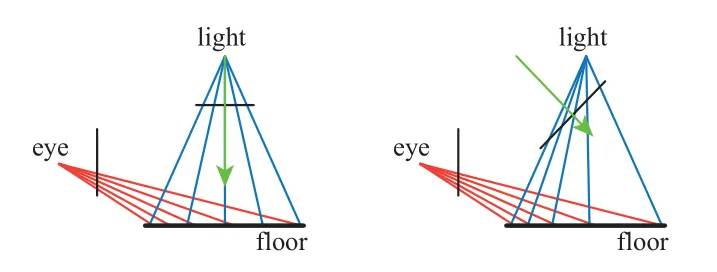
下图左边展示了Shadow Acne出现的原因,黑色的竖线代表Shadowmap中像素点的位置。左边是未添加Bias的情况,当我们在彩色的位置点进行比较深度时,其实采样到的深度是旁边的竖线处x标记位置的深度,可以看出,绿色点的深度测试是正确的,蓝色和橙色的深度测试是错误。下图中间是使用了Bias的情况,将深度值沿着光照方向进行偏移固定的距离。这样绿色和橙色的点形成了正确的深度值,但是由于偏移的值比较小,蓝色的点的阴影计算,仍然是错误的。
左:出现Shadow Acne的原因; 中:使用Constant Bias; 右:使用Slope Scale Bias

我们发现,在斜面角度较大时,一个固定的偏移值就不再适用了,因此一个常见的改进,就是根据斜面角度来改变偏移值,叫做 Slope Scaled Depth Bias / Slope Bias 。如上图右边所示,可以看出所有的点的阴影计算结果都是正确的。
设平面法线和光照方向的夹角为θ,视锥大小为frustrumSize,Shadowmap的大小为 shadowmapSize,考虑到我们需要半像素的偏移,这样我们可以计算出需要的Slop Bias的偏移值为:
不过我们可以注意到,这个偏移值是和tan(θ)成正比的,这样的话,当θ趋近于90度时,偏移值是趋近于无穷大的,因此我们需要为偏移值设置一个最大值。
在实际游戏引擎实践中,我们常常需要结合两种Bias来使用,这样来达到较好的效果。
这两种Bias都可以通过图形API硬件来实现。例如在DX11中,我们可以在OutputMerge阶段中,通过参数指定两种Bias的值[1]:DepthBias和 SlopeScaledDepthBias ,这样总的Bias计算方式为:
Bias = (float)DepthBias * r + SlopeScaledDepthBias * MaxDepthSlope;我们还可以设置DepthBiasClamp的值,防止计算出的Bias值过大:
Bias = min(DepthBiasClamp, Bias)另外一种常用的替代Slope Scaled Depth Bias的方案是 Normal Offset Bias ,将阴影的计算位置沿着物体表面的法线偏移,通过计算我们可以算出需要偏移的距离为:
相对于Slope Scaled Depth Bias,这种方式的一个优点是不用担心θ趋近于90度时,整个偏移值趋近于无穷大。
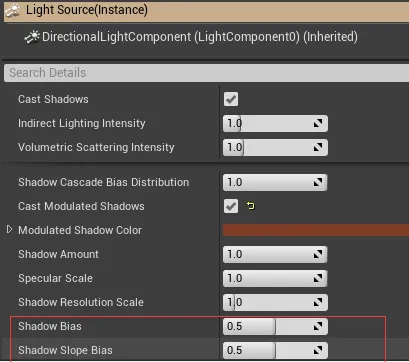
UE4中,使用的 Constant Bias + Slope Scaled Depth Bias :
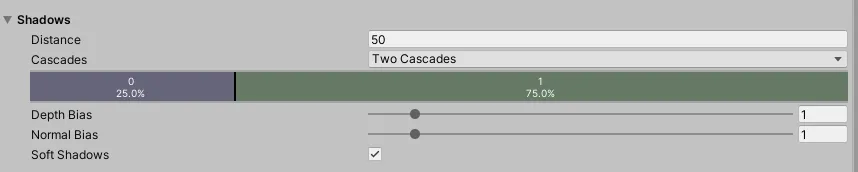
Unity中,使用的是 Constant Bias + Normal Offset Bias :
当然,我们的Bias值也不能设置得过大,否则会出现漏光等问题,也叫做 Peter Panning 。
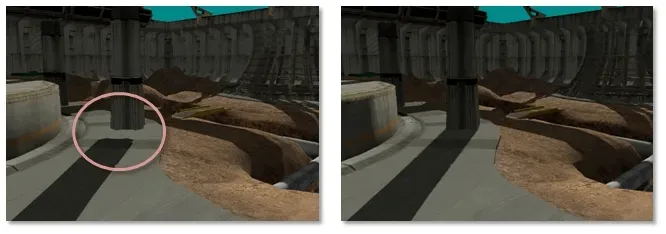
为了保证这种Bias的方式能正确地解决深度冲突。我们应尽量保证物体几何模型是正确的,保证正反面朝向是对的,尽量保证模型封闭,且避免使用太薄的物体模型。
添加Bias可以是在生成Shadowmap阶段完成,也可以在阴影计算阶段,也就是生成Shadowmap时。在Vertex Shader中通过反向添加Bias的方式来偏移计算处的Shadowmap深度值,这样可以节省一些运行开销,且可以简化阴影的计算,这样在采样阴影时,就无需考虑计算偏移的问题。
大部分情况下二者得到的效果是基本接近的,不过在Shadowmap生成阶段添加偏移这种方式也有一些瑕疵:
- 不够灵活,所有点的偏移值完全相同,意味着无法根据情况灵活调整Bias值,比如在PCF采样软阴影时,只能提前给出比较大的Bias值,而无法根据PCF Radius的大小灵活调整;
- 和Normal Offset Bias,在光照角度比较小的时候,会导致渲染结果错误[2],Unity中的阴影就有这样的缺陷。

还有一种比较少见的解决自阴影的方式,是将物体背面的深度写入到Shadowmap,进行深度测试时,就不会出现深度冲突。但是这种方式有很大限制,要求使用的模型必须是正确封闭的,且正反面没有错误。而且如果物体模型很薄,导致前面和背面深度几乎相等,这种方式仍然会失效。因此这种方式不太通用,现在已经很少能见到。
4. 移动平台的Pack
某些旧的移动平台不支持浮点数纹理,这时需要我们将Shadowmap的深度值Pack到RGBA贴图中,Pack和UnPack的公式如下:
//Pack:
vec4 comp = fract(depth * vec4(255.0 * 255.0 * 255.0, 255.0 * 255.0, 255.0, 1.0));
comp -= comp.xxyz * vec4(0.0, 1.0 / 255.0, 1.0 / 255.0, 1.0 / 255.0);
//UnPack:
float depth = dot(texture((m_tex), (m_uv)), vec4(1.0 / (255.0 * 255.0 * 255.0), 1.0 / (255.0 * 255.0), 1.0 / 255.0, 1.0))这里我们使用的是255作为模来使用,网上也能搜索到使用256作为模的版本。
但是测试结果表明,使用256时精度是不如255的[3],而且还会遇到不同硬件表现不一致的问题,因此强烈建议使用255 作为参数。
5. Spot Light Shadow, Perspective Correct
在写入到 Shdowmap 时,对于一个平行光,我们使用的是正交投影矩阵。而对于一个聚光或者点光源,我们使用的是透视投影矩阵。
Spot Light Shadowmap 的特殊处理,使用线性深度。
6. Point Light Shadow
Geometry Shader 的应用,
SV_LAYER 作为REnderTarget
不需要 perspective correct
7. 基于 Shadowmap 的透射阴影
实现如 SSS 效果等
Shaowmap精度提升
由于Shdowmap的精度限制,我们在渲染中会遇到各种各样的渲染问题。
一种叫做Perspective Aliasing,由于shadowmap是在lightsapce中进行计算的,所以在 view frustrum 近处观察时,每个像素对应shaodowmap 中 texel 的比例就会降低,产生锯齿。
另外这一种叫做 projective aliasing,是在斜面上进行渲染时,shadowmap 精度不足产生的,本质上来说和Perspective Aliasing是相同的。
通常,提升Shadowmap的分辨率可以改善上面两种渲染问题。但是处于性能考虑,我们不会把Shadowmap的分辨率设置的太大,而是使用一些手段,来提高渲染结果的精度。
1. 使用Perspective Warping
这类方法,通过修改光照空间的投影矩阵,来为视锥近处的物体阴影,提供更高的精度。
常见的有这样几种方式,Perspective Shadow Maps(PSM),Light Space Perspective Shadow Maps(LiSPSM)和Trapezoidal Shadow Maps (TSM)。这些修改投影矩阵的方式原理上大致都是相通的,如下图所示,显示了这类方式的原理:
改变计算Shadwomap时的投影方向,就可以为近处提供更高的精度。
这类方式虽然使用起来简单,但是有很多无法处理的特殊情况,比如观察方向和光照方向完全相同时,这类方式就完全无法发挥作用。而且在摄影机移动时,这种方式非常的不稳定。
这类方式目前已经被彻底淘汰,这里也就不再深入讲解相关的原理和实现。
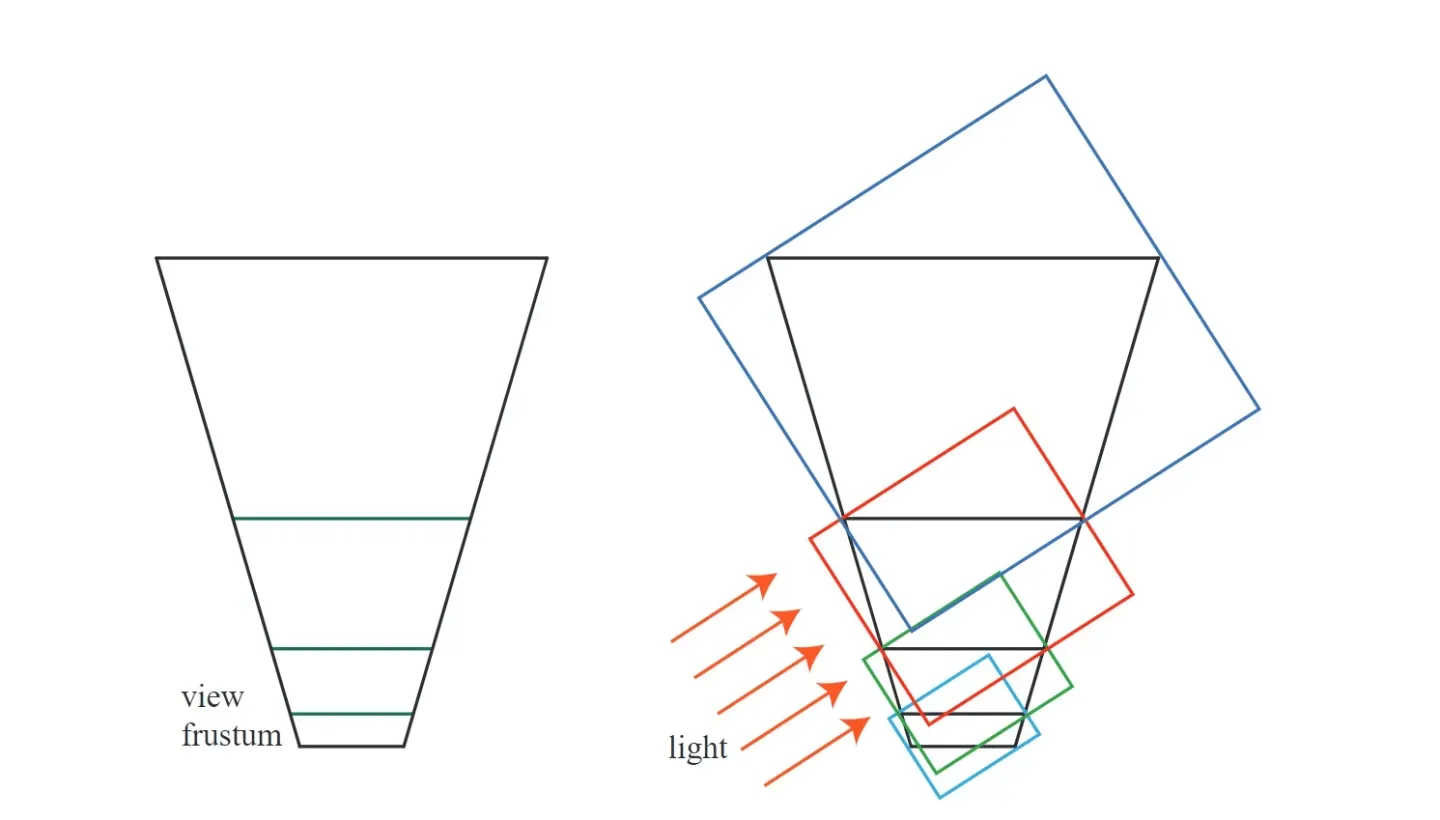
2. Cascaded Shadow Maps(CSM)
CSM是目前最常见的提高Shadowmap精度的手段,候也叫做Parallel-Split Shadow Maps。
通常在渲染视角附近的物体时需要更高的Shadowmap精度,而直接生成的Shadowmap往往不符合这个条件,所以将Frustum分割成数个部分,每个部分单独生成一张Shadowmap,最后组合成一张Atlas。
从理论上来说,使用指数分布的CSM划分方案是最佳的,即满足
f、n是相机的far、near值,n是指数系数。
比如我们取n=3,f=1000。 这样我们划分出来的三级CSM就是:1-10,10-100, 100-1000。
但是如果我们这样来划分,最近处1-10这个范围的一个CSM划分,物体太少,反而会导致Shadowmap空间的浪费。因此在实践中,常常会结合指数划分和其他划分手段来使用,或者直接由用户手动设置相应的比例值。

3. Stablize CSM
在使用Shadowmap时,在移动摄影机时,我们经常会遇到阴影闪烁的问题。因为当摄影机移动后,摄影机的View Frustrum会发生改变,同时Light Space的Frustrum会相应改变,就会造成两帧直接的阴影位置不一样,产生闪烁,在没有使用PCF过滤阴影时,会尤其明显。下图显示了这种闪烁的示例,可以看出视角的微小变化,导致阴影产生了剧烈的闪烁:
通常我们会使用Stabilize Cascades来解决这个问题,Stabilize Cascades将相机的移动分成两个部分来处理,分别是相机的旋转和平移。无论相机是如何运动的,都可以分解成沿着视锥中心的旋转和平移。
首先来看绕视锥中心的旋转,当视锥旋转时,因为视锥边界的改变,就会导致计算出来阴影的Light Space Frustrum改变,产生不稳定的结果。要解决这个问题,我们将视锥 Frustrum计算出一个球形的Bounding Volume出来,并用这个球形的Bounding Volume 来算出阴影的Light Space Frustrum,这样当我们的视锥沿着球体中心旋转时,得到的球形Bounding Volume是不变的,算出来的阴影的Light Space Frustrum自然也不会变化。
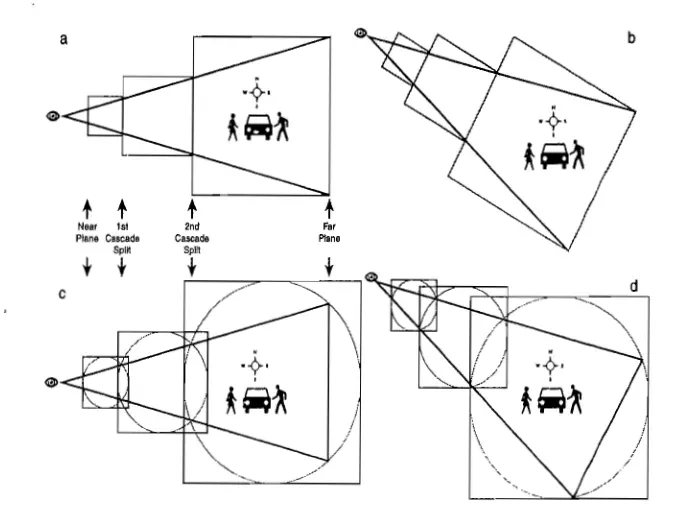
ab展示的传统的Light Space Frustrum计算过程,cd使用球形BV时的计算过程,在摄影机转动时也是稳定的。
从Frustrum生成Bounding Box Sphere,可以使用简单方法求出中心点,算最大半径的方式。也可以使用能得到更加紧凑边界的标准算法。
接下来就是处理摄影机平移的部分了,这一步的处理,就是通过偏移投影矩阵,来保证两帧之间,世界空间中的同一点,能投影到Shaodwmap中的相同相对像素位置上。为了计算方便,我们常常取世界空间中的零点,作为参考点,将世界空间的零点,变换到Shadowmap坐标中,并通过偏移,确保得到的Shadowmap坐标是对齐于某个像素的。对齐过程实现的大致代码如下:
// Create the rounding matrix, by projecting the world-space origin and determining
// the fractional offset in texel space
XMMATRIX shadowMatrix = shadowCamera.ViewProjectionMatrix().ToSIMD();
// 使用零点作为参考点
XMVECTOR shadowOrigin = XMVectorSet(0.0f, 0.0f, 0.0f, 1.0f);
// 将参考点变换到 shadowmap的坐标
shadowOrigin = XMVector4Transform(shadowOrigin, shadowMatrix);
shadowOrigin = XMVectorScale(shadowOrigin, sMapSize / 2.0f);
// 在shadowmap坐标系中,将坐标对齐到整数坐标线上
XMVECTOR roundedOrigin = XMVectorRound(shadowOrigin);
XMVECTOR roundOffset = XMVectorSubtract(roundedOrigin, shadowOrigin);
roundOffset = XMVectorScale(roundOffset, 2.0f / sMapSize);
roundOffset = XMVectorSetZ(roundOffset, 0.0f);
roundOffset = XMVectorSetW(roundOffset, 0.0f);
//应用偏移,得到新的 projection 矩阵
XMMATRIX shadowProj = shadowCamera.ProjectionMatrix().ToSIMD();
shadowProj.r[3] = XMVectorAdd(shadowProj.r[3], roundOffset);
shadowCamera.SetProjection(shadowProj);在大部分游戏引擎中,Stablize CSM都是默认打开的。不过需要注意的一点是,打开Stablize CSM时,因为阴影的有效范围减少了,所以是会导致阴影精度降低的。在可以保证阴影效果足够软而不会产生闪烁的时候,也可以选择关闭这个功能,来提升阴影的精度。
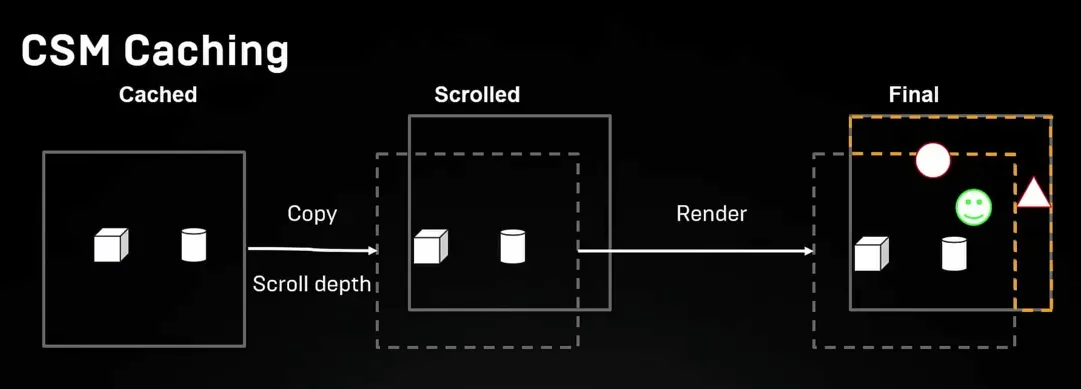
4. CSM Caching 在使用CSM时,我们常常会遇到CSM开销较大的问题,比如现在使用四级CSM级联,就意味着在生成Shaodwmap时,很多物体需要重复绘制四次。因此有的时候我们会对CSM进行一些优化。
一种方式是降低远处CSM的更新频率。比如在原神的PC版中,共有八级的CSM,前四级是每帧都更新的,后四级是逐帧依次更新的,这样相当于每帧需要更新五级的CSM。
另外一种方式是将CSM中算出的阴影动态缓存,对于静态物体的Shadowmap,是可以实现前后两帧之间的复用的。上一帧中静态物体的Shadowmap,经过一些小小的处理,在当前帧仍然是可用的,对于一些没有覆盖的区域,可以动态来检测,重新绘制生成:
5. Virtual Shadow Map: 未来的发展方向
随着 Virtual Texture 技术在游戏引擎中的逐步推广,Virtual Shadow Map 也开始进入大众的视野之中。
UE5 中推出了 Virtual Shadow Map 的功能。理念类似Nanite的流加载。
基于 Shadowmap 实现软阴影
1. Percentage-Closer Filtering (PCF)
采样shadowmap 时,我们往往这样来实现一些软阴影的效果:在目标采样点周围,进行四次采样,然后取平均值,作为最终结果。注意这里的取平均值,并不是取平均值后进行比较,而是对四个采样点,分别进行深度测试,然后每个采样点的0或1的结果值进行平均,这样在半影区域就能得到软阴影效果。
这种将采样结果进行平均的方式叫做 Percentage-Closer Filtering (PCF) ,PCF通过将目标点附近的采样结果平均,来模拟出半影的效果。
现在的硬件都直接提供周围四点采样的加权PCF深度测试,比如OpenGL中的sampler2DShadow,DirectX中的 SampleCmp。这种采样的加权方式类似于普通像素采样时的双线性采样,在目标位置附近2X2像素中,逐像素进行深度比较,得到结果值0或1,然后将结果按照相对周围像素位置进行加权平均。
直接使用硬件PCF,只能采样到2X2的像素点,得到的半影过渡,往往不够柔和。如果想要更加柔和的阴影过渡,或者把半影区域扩大,就需要将采样点分布范围扩大,也需要增加采样点的个数。
简单的方式,是直接在目标点周围按照 Grid 模式进行采样,但是这样往往会在半影中看到分层的瑕疵。
因此我们更加常用的方式,是使用预计算好的 Possion 分布的采样点,来进行采样。为了使结果进一步平滑,我们还可以使用逐像素的噪声值,对采样点位置进行旋转,这样每两个相邻的像素点,采样的模式都是不同的,可以有效地平滑半影区域。
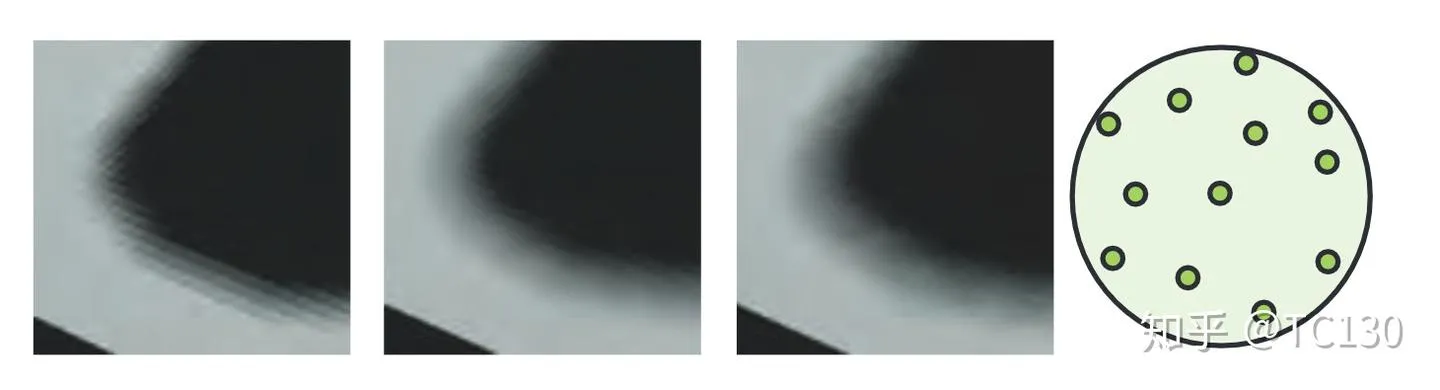
从左到右是 4*4 Grid采样,12点Possion采样,12点Possion采样 + 旋转,Possion分布图
2. PCF软阴影的bias问题
在前面我们已经讲过 bias 的问题,在PCF采样中,因为PCF采样 shadowmap 的范围会比较大,因此会进一步暴露出 shadow acane 的问题。当然我们也有响应的手段来解决这些问题。
一种简单的方式,是根据PCF filter kernel 的大小,来动态改变 shadow bias 的大小,当然这样做的缺点也很明显,就是 PCF kernel 越大,就会损失越多的阴影精度信息。
另外一种方式是 bias cone ,根据当前采样点到采样中心的位置,来缩放bias的大小,如下图左边所示。是一种相对简单有效的缓解 bias 问题的方案。
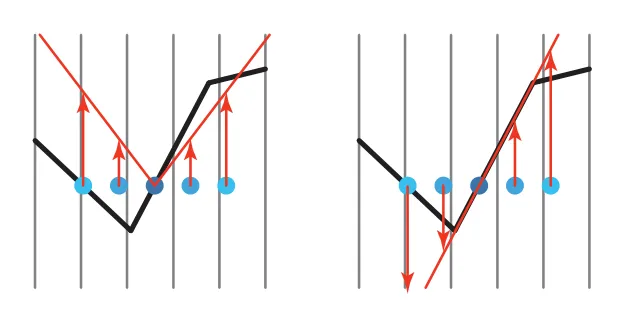
上图右边显示的一种逐采样点来做精确bias的算法, Receiver Plane Depth Bias, 这种方式需要假定接受阴影的是一个平面,然后会根据每个阴影采样点到中心的位置,来计算偏移。一般能产生非常好的结果。
3. Percentage-Closer Soft Shadows (PCSS)
PCF阴影的一个缺点,就是半影的宽度非常固定,无论产生阴影的位置距离光照有多远,半影的宽度都是一样的。
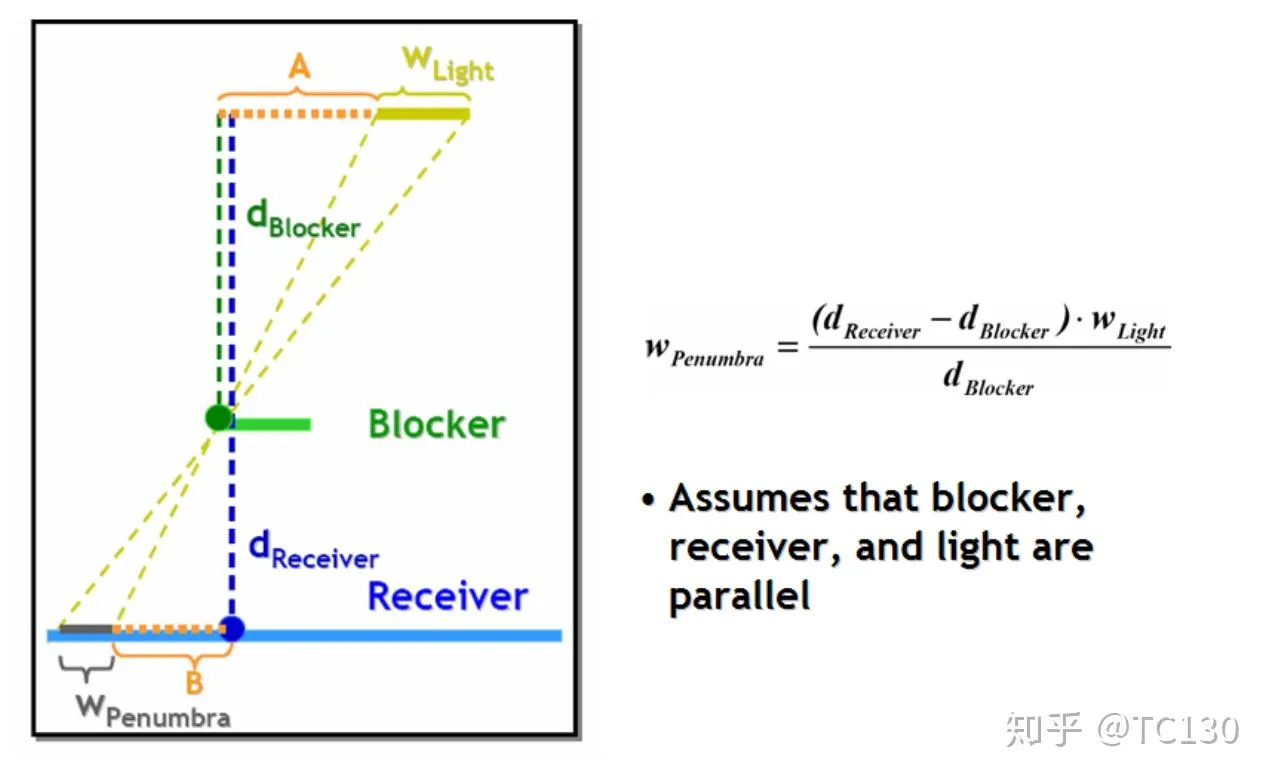
PCSS通过判断半影到遮挡物和半影到光源的距离,来动态确定半影的宽度。半影宽度越大,采样阴影的模式分布也越大,就能得到越柔和的阴影。这样就能得到如下图右边所示的,随距离变化的阴影效果。
左:PCF硬阴影,中:PCF软阴影,右:PCSS阴影
PCSS算法分成这样几个步骤:
- 计算出区域内平均 blocker 深度;
- 根据 blocker 深度,计算出需要的半影宽度;
- 用半影宽度,作为 PCF kernal 的大小,计算出阴影。
PCSS的计算其实很简单,就是根据三角形相似,来计算出采样所需的分布距离,然后将距离内的采样值进行平均。
不过当半影宽度非常大时,就需要非常多的采样点,这样采样shadowmap的开销也会变大。因此PCSS是一种不太稳定的软阴影方案,在游戏中的实际应用并不是特别多。
4. Manual PCF 计算
基于shadowmap 的逐物体阴影/Per Obejct Shadow
1. PerObject Shadow的实现
这里,我们来小结一下逐物体阴影的常用应用场景。
- Stationary模式的光照,烘焙静态物体的阴影;
- 高精度角色阴影,和场景阴影分离;
- 超出CSM阴影范围的物体,单独处理阴影;
- 移动端廉价的 modulated shadow 实现(后面会讲到)。
2. 使用 Shadowmask 混合多种 Shadow
由于阴影技术非常繁多且复杂,我们的阴影可能来自于如下技术的一种或者几种:
- CSM Shadow
- Per Object Shdow
- Capsule Shadow
- 烘焙阴影
如果同时在 Shader 中多个 PerObject 阴影。如果在一个pass中同时判断多个阴影,那么处理起来会非常麻烦,切回产生大量的 shader 变体。
一种通用的解决方案,是将阴影预先绘制到 shadowmask上。绘制到 shadowmap 时,可以使用相同的通道,分别使用不同的方式写入 shadow 值,混合方式选择取最小。
3. Modulated shadow的实现
前面我们讲到的平面阴影,只能投射阴影到平面上,在使用shadowmap保存深度后,就可以将阴影投射到任意的曲面上,具体放方法如下:
首先我们得到需要渲染阴影物体的AABB,然后将AABB转换到 lightsapce,得到新的 orthogonal light space ABB。然后我们将物体的深度渲染到一张 shadowmap 中。
我们将 lightspace 的 AABB 沿着 光照方向进行延长,就得到了一个 shadow volume。
接下来我们就可以使用这个 shadow volume 来得到投射阴影了。将 shadow volume作为几何体进行渲染,在shader中读取当前位置的 depth 值,反算出世界坐标,在通过投影矩阵算出光照空间下的深度值,在 shadowmap中进行采样,得到阴影。将最终输出结果的混合方式为 DstColor Zero,这样,被遮挡区域有阴影的位置,颜色都这样乘以一个阴影系数,得到一个染色的效果,也就实现了 modulated shadow。
注意,为了防止在不需要阴影的区域渲染出阴影,我们需要在代码中进行clip,如果计算出shadowmap中对应的uv坐标超出0~1的范围,就不再渲染阴影。在Unity中实现的 shader 代码大致如下:
float4 frag (v2f i) : SV_Target
{
float2 uv = i.vertex.xy * (_ScreenParams.zw - 1);
float depth = tex2D(_CameraDepthTexture, uv).r;
#if !UNITY_REVERSED_Z
depth = depth * 2 - 1;
#endif
#if UNITY_REVERSED_Z
uv.y = 1 - uv.y;
#endif
float4 clipPos = float4(2.0f * uv - 1.0f, depth, 1.0);//
//反算出世界空间坐标
float4 worldSpacePos = mul(UNITY_MATRIX_I_VP, clipPos);
worldSpacePos /= worldSpacePos.w;//
//得到shadowmap中uv坐标
float4 projectorPos = mul(_WorldToProjector, worldSpacePos);
#if UNITY_REVERSED_Z
projectorPos.z = clamp(projectorPos.z, 0.0001, 1);
#else
projectorPos.z = clamp(projectorPos.z, 0, 0.9999);
#endif
// uv不在0~1范围内,不需要阴影
clip(projectorPos.xy);
clip(1 - projectorPos.xy);
projectorPos.xy = projectorPos.xy * _ShadowmapTex_ST.xy + _ShadowmapTex_ST.zw;
float shadow = SAMPLE_TEXTURE2D_SHADOW(_H3D_GroundShadowmapTex, sampler_H3D_GroundShadowmapTex, projectorPos.xyz).r;
return shadow;
}Modulated shadow 有这样两个明显的缺点:1,无法完全正确还原阴影效果,因为 modulated shadow 是通过将原色乘以某个系数来实现的阴影,而非遮蔽光照形成阴影,因此效果会有误差。而且多个modulated shaodw 会多次叠加在一起。2,在特定的观察角度下,modulated shadow 可能会穿过被投射阴影的物体。

UE4中Modualted shaow的效果,可以看到两个人物的阴影出现错误的叠加。

天涯明月刀手游中的modualted shadow,错误地穿过了树干
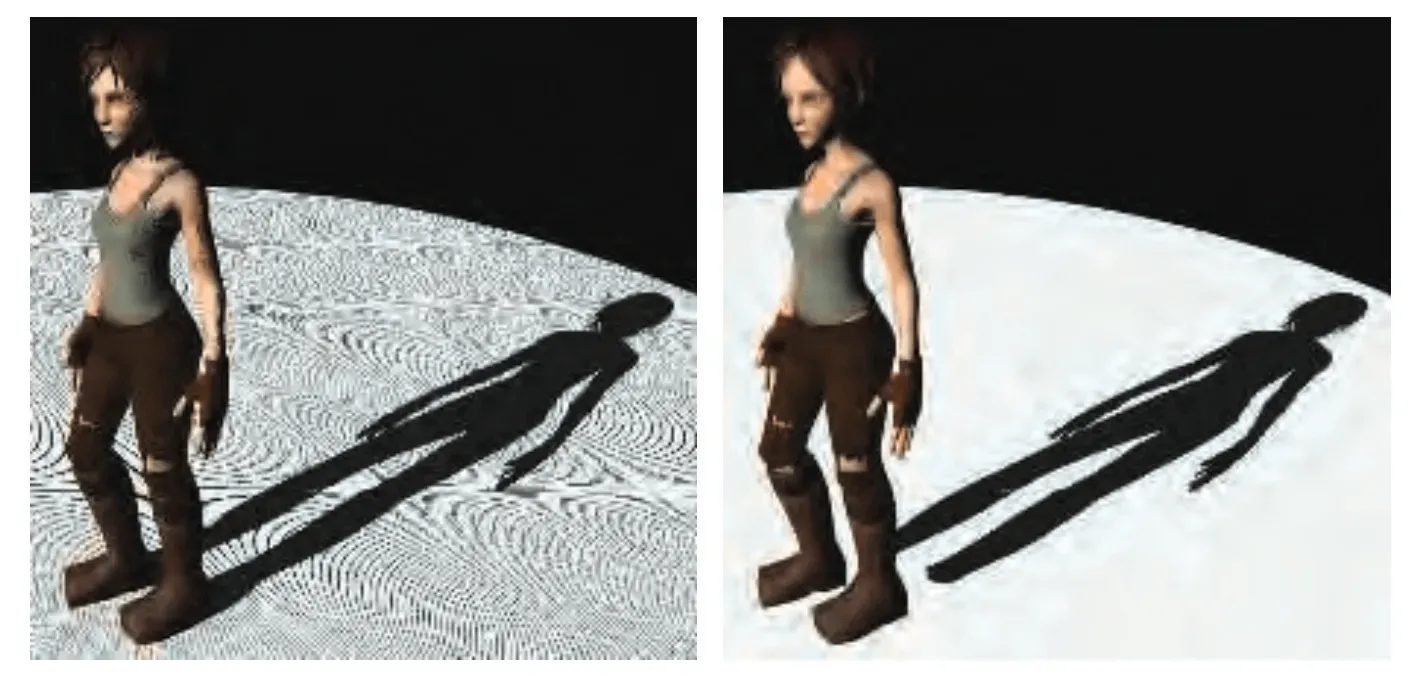
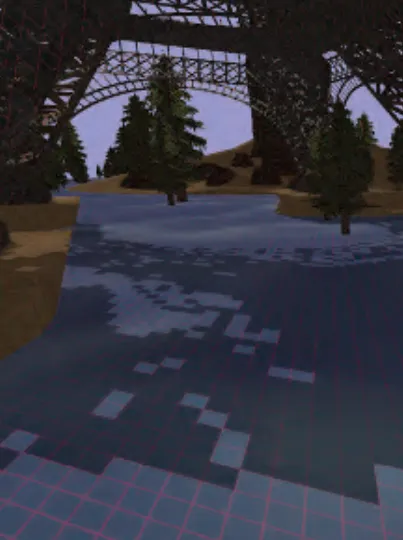
在游戏实践中,最常用到 modulated shadow的地方,就是将人物投影在地面上。我们知道,modulated shadow 的效果是有偏差的,特别在人物身上这种非常高频的区域,就会非常明显。因此我们通常会使用模板的方式,将人物身上的modulated shadow剔除掉,只显示在地面上。对于人物身上的自阴影,我们会按照正常的shaodwmap 来渲染。
这样一来,我们为人物单独生成一张 shadowmap,会同时在两个地方用到,一是用于产生人物身上的自阴影,二是用于地面投射的modulated shadow。这也是手机游戏中常用的一种处理人物角色阴影的方案。
比如在天涯明月刀手游中,就是使用这样的实现方式。如下图所示,左边是 shadowmap,右边是渲染的结果,shaowmap 同时用来实现人物身上的自阴影和地面上的 modualted shadow。
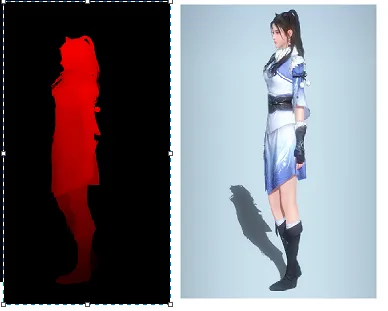
左边是仅针对人物生成的shadowmap、同时用于人物的自阴影,和地面的投影
基于ZBuffer的 Filterable Shadowmap
前面介绍的是使用 PCF 来得到软阴影,在每次计算阴影时,需要进行很多次的采样和计算,如果想要更加柔和的阴影过渡,就只能通过增加采样次数来实现。在这里,我们将介绍下一些可以预过滤的阴影技术,这些技术可以将得到的 shadowmap 进行模糊预处理,来得到软阴影,这样可以降低计算软阴影的开销。
1. Variance Shadow Map(VSM)
VSM 使用两张 shadowmap,分别存储深度值和深度值的平方,具体原理如下:
已知切比雪夫不等式为:
这样,我们使用两张 shadowmap 分别存储深度值和深度值的平方。这样,将两张 shadowmap 进行 filter 处理(使用 mipmap 或者双 pass 高斯模糊),就可以直接得到 和 ,已知方差 ,这样,我们可以直接将得到的 值作为阴影系数值来使用,方便地得到软阴影。
当然,从上面的切比雪夫不等式我们可以看出,这里的 ,其实只是一个概率值的上界,我们这里是直接使用这个上界作为最终的阴影系数来使用了。
下面,我们就来证明下,在简单的光照环境下,这种直接使用上界得到的阴影系数是合理的:
现在有一个深度值为 的平面,投射阴影到深度值为 的平面上。现在我们在采样阴影时进行 filter,设 为未被遮挡的比例,也就是我们期望得到的阴影系数值,由此我们可以得到:
我们从切比雪夫不等式中得到的概率上界为:
和我们的期望值是相等的,证明我们这样来使用切比雪夫不等式的概率上界是正确的。
这样,我们就可以通过对 shadowmap 进行预处理,来得到软阴影。
我们的实现过程大致如下:
1、在光照空间下,将深度值和深度值的平方分别存储到两张 flaot 格式的shadowmap中;
2、将两张shadowmap进行mipmap处理,或者使用双pass高斯模糊;
3、在渲染时进行阴影计算,如果当前像素点的深度值小于平均深度 ,说明该点没有被阴影遮挡。如果深度值大于平均深度,就是用前面的公式来计算阴影系数。
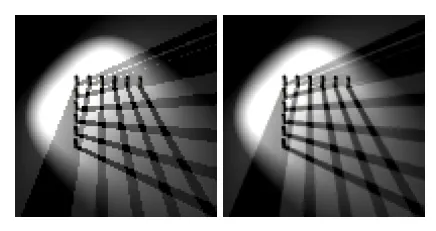
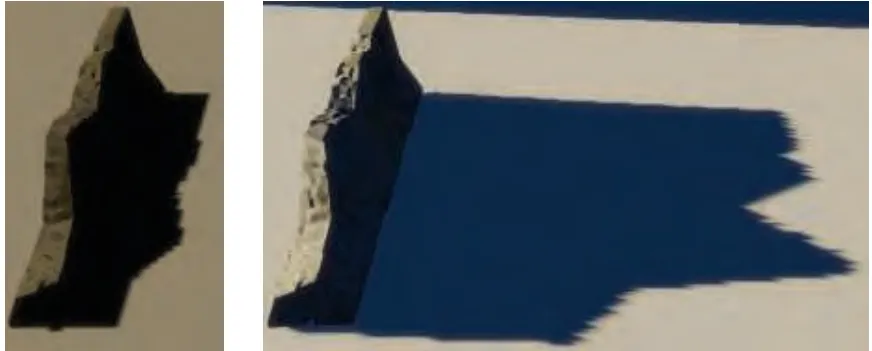
左:直接进行VSM计算;右:先进行mipmap处理,再计算VSM
在一些复杂光照环境下,VSM可能会出现一些瑕疵。
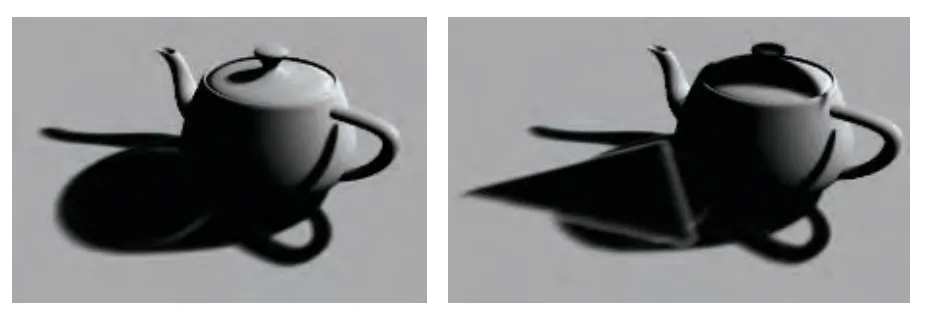
左边是正常的VSM计算,在右边,添加了一个三角形后,造成了明显的漏光
2. Exponential Shadow Map ESM
ESM 也是一种类似 VSM 的 Filtered Shadow Map。在空间中有一点 ,设 为 到光源的距离, 表示当前方向上最近的遮挡物的距离,这样我们得到阴影函数为:
得到的结果是 0 或者 1,表示当前的点是否被阴影遮挡。
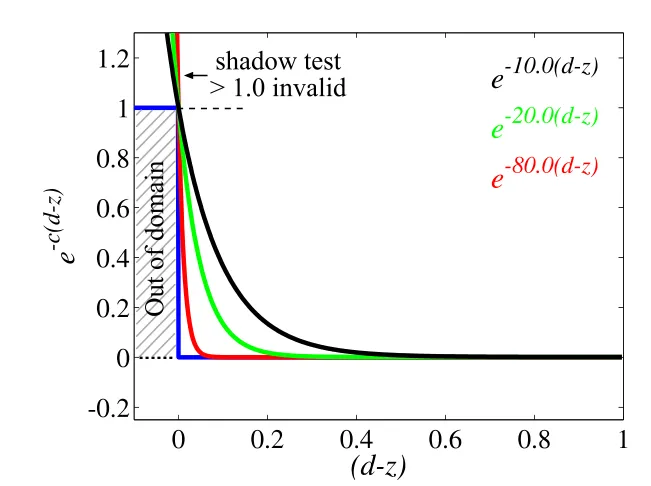
现在,我们使用指数函数来代替函数 ,我们这样来定义这样一个指数的函数,来代替原来的 0 或 1 的大小判断:
从下图中我们可以看出,当 时,新的函数 和原来的阴影判断函数 是非常接近的,且 的值越大,就越接近。
在使用原始的阴影函数计算软阴影时,得到的过滤后的结果为:
这也是我们熟悉的 PCF 计算软阴影的方式。现在,我们使用指数函数来代替上述的计算过程:
观察最后这个公式,我们发现左边的部分是可以直接在计算阴影时求得,右边的部分,其实是可以通过预过滤的方式计算出来。也就是说,我们生成的 shadowmap 中存储 的值,然后对 shadowmap 进行 filter 处理,就可以得到右边 的部分。
从前面的图像中我们知道, 的值越大,指数函数的图形就和真实的阴影判断越接近。不过在实际计算时,由于精度的限制,我们不能把 的值设置得过大,通常选择一个合适的值即可。
一个针对 ESM 的改进,是对深度值的编码做出一些改进,将结果保存在 log 空间中,这样可以使用更大的 值,得到的结果精度自然也会更高:
3. Exponential Variance Shadow Map EVSM
EVSM是一种对VSM的改进,人们发现,在使用VSM的时候,可以将深度使用一个 wrap 函数进行处理,然后直接对 wrap 后的结果进行VSM中同样的计算处理,可以得到更好的阴影结果。
借鉴ESM中的做法,这个 wrap函数就是 。在实践中,会使用 再求出一个 wrap 值,然后取两个结果的最小值。
因此这种方法叫做EVSM,结合了ESM和VSM的优点,缺点就是使用的Buffer存储较多,需要4通道。
4 . Moment Shadow Map MSM
moment意思是矩,表示变量的分布特征,比如一阶矩就是平均值,二阶矩就是方差。
5 . Filterable Shaodwmap的小结
各个方案的概览如下,一般来说,使用的通道数越多,效果也越好。
| 方案 | 使用通道数 | 保存的参数 |
|---|---|---|
| VSM | 2 | , |
| ESM | 1 | |
| EVSM | 4 | ,,, |
| MSM | 4 | ,,, |
一个网络上的不同shadowmap技术的示例。
相对于普通的PCF阴影,Filterable Shadowmap 拥有一些模糊阶段的固定开销。在采样非常软的阴影的时候,相对普通的PCF是有性能优势的。但是在硬阴影下,性能反而会下降。
除此之外,Filterable Sadowmap 要产生类似类似PCSS的可变柔和度的阴影,实现起来要复杂很多。
而且 Filterable Shaodmap还有考虑硬件兼容,数值溢出,以及一些漏光等边界条件。因此个人不是非常推荐使用 Filterable Shadowmap 来代替普通的PCF阴影,特别是在移动平台上。不过在使用静态烘焙阴影时,因为可以进行预处理模糊阴影,使用 Filterable Shaodmap 是一个可以用来尝试降低运行开销的方案。
Contact Shadow
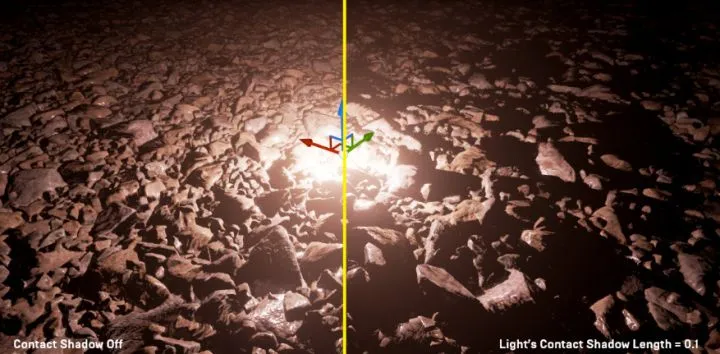
前面我们讲过,仅仅使用 CSM 阴影的话,在近距离观察人物的时候,精度往往是不够的。除了使用 PerObjectShadow 之外,另外一种提供近处高精度阴影的方式是使用 Contact Shadow。
Contact Shadow 的原理比较简单,是在屏幕空间进行逐像素的 RayMaraching,来得到高质量的近距离阴影。因为RayMarching的开销较大,Contact Shadow RayMatching的距离一般都很短,大约在0.1m~0.5m左右。

Contact Shadow对 CSM 阴影通常是近距离细节补充的关系,一般不会直接使用 Contact Shaodw 来代替普通的阴影计算。
Contact Shadow的另外一个用途,是用于使用了parallax occlusion mapping的场景。此时无法在 shadowmap中算出精确的偏移值,就可以使用 Contact Shadow。
基于SDF的阴影
前面我们说的阴影,都是通过处理模型来实现的。
SDF/Signed Distance Field 是一种保存空间中信息的场,保存空间中当前位置到最近的模型表面的距离。在物体外部时使用正数,在物体内部时使用负数。
由于 SDF 信息和模型的面数无关,因此我们可以使用非常大范围的 SDF 信息,并且使用 Clipmap 来做 LOD 处理。CSM 阴影,在距离较远处,由于需要处理的模型较多,开销也会增大。而 SDF 阴影就没有这个问题。
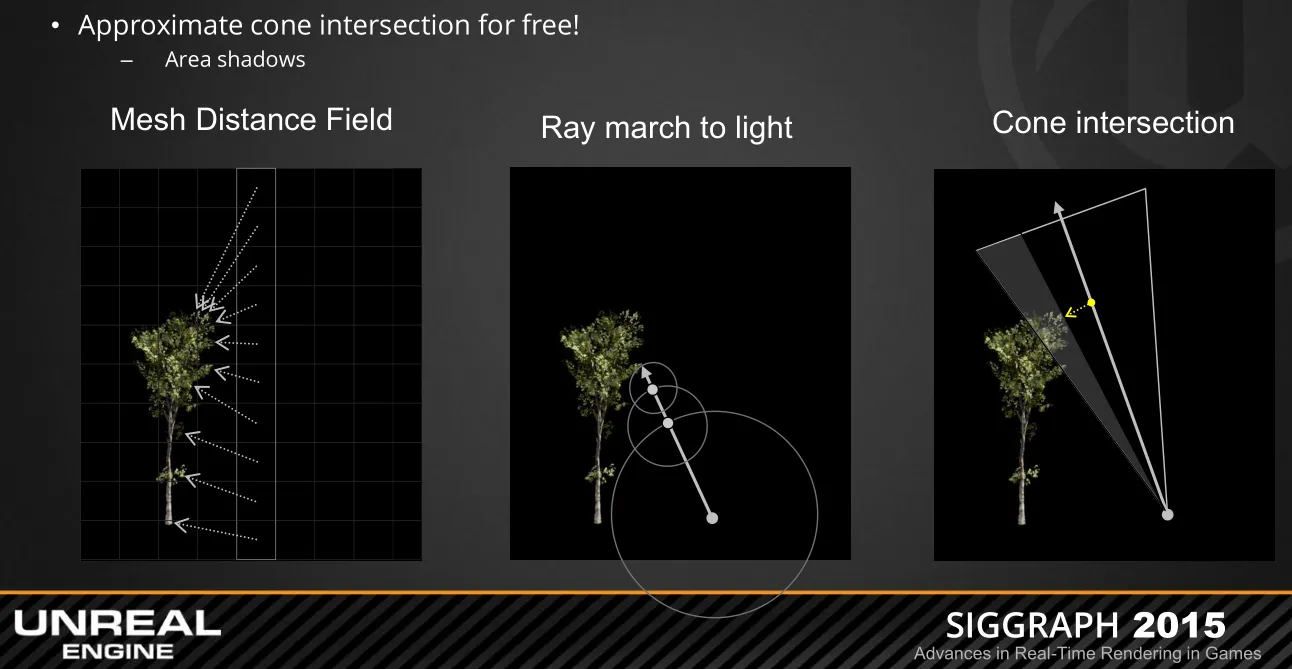
SDF 的另外一个优势,就是可以非常方便地实现 Cone Tracing,进而方便地实现软阴影和面光源阴影效果。相对于 Shadowmap 阴影,SDF 阴影更加柔和。

环境光照的阴影
环境光照的阴影,其实就是我们常说的 SSAO,即环境光照遮蔽。这里不作详细的介绍。
Capsule AO 和 Capsule Shadow
使用 SSAO 时,得到的 AO 效果范围较小,会导致人物的 AO 效果不是很好。而人物是动态的,又无法使用烘焙 AO。Capsule AO 将人物模型简化成胶囊体形状,并进行 AO 计算,来得到范围更大,更加柔和的 AO。
同样,经过前面的分析我们知道,要使用 shadowmap 来实现大范围软阴影,是非常困难的。Capsule Shadow 是一种用于实现柔和的人物投影的阴影。
基于光线追踪的阴影技术
阴影是实时光追中比较简单的应用,实现起来也非常简单。使用光线追踪,可以非常方便地实现一些面光源的软阴影效果,只需要在面光源上,采样很多个点,然后和目标点之间进行连线并计算遮挡。
体阴影
前面我们讲的阴影,都没有考虑半透明物体的阴影。在考虑半透明阴影后,事情就会变得非常复杂。关于这方面的内容,会在未来的文章中详细讲解。